
tft lcd raspberry pi gpio pins factory

I needed a display for a new project that I am working on and saw that the 3.5 RPI Display Board was on sale and decided to pick one up. I"ve previously used mini OLED displays before, but they"re pretty limited by its size and the colors that it can display. This is a 480x320 resolution device that is designed to affix right onto the Raspberry Pi (RPi) GPIO pins. The installation is simple as you"d imagine:
I am using a vanilla Raspbian lite and no additional drivers were required to get this working. All we need to do is configure some boot scripts and introduce some new configuration files. It"s possible to do this manually, but thankfully LCD-Show automates the process for us.
It would have been nice if I could have mirrored the HDMI output and the LCD panel at the same time, but I could not figure out how to do this or if it was possible at all.
The LCD is compatible with both the Raspberry PI Zero and its big brother variants so these same instructions can be applied to get them both running.

A powerful feature of the Raspberry Pi is the row of GPIO (general-purpose input/output) pins along the top edge of the board. A 40-pin GPIO header is found on all current Raspberry Pi boards (unpopulated on Raspberry Pi Zero, Raspberry Pi Zero W and Raspberry Pi Zero 2 W). Prior to the Raspberry Pi 1 Model B+ (2014), boards comprised a shorter 26-pin header. The GPIO header on all boards (including the Raspberry Pi 400) have a 0.1" (2.54mm) pin pitch.
The numbering of the GPIO pins is not in numerical order; GPIO pins 0 and 1 are present on the board (physical pins 27 and 28) but are reserved for advanced use (see below).
Two 5V pins and two 3.3V pins are present on the board, as well as a number of ground pins (0V), which are unconfigurable. The remaining pins are all general purpose 3.3V pins, meaning outputs are set to 3.3V and inputs are 3.3V-tolerant.
A GPIO pin designated as an input pin can be read as high (3.3V) or low (0V). This is made easier with the use of internal pull-up or pull-down resistors. Pins GPIO2 and GPIO3 have fixed pull-up resistors, but for other pins this can be configured in software.
As well as simple input and output devices, the GPIO pins can be used with a variety of alternative functions, some are available on all pins, others on specific pins.
A handy reference can be accessed on the Raspberry Pi by opening a terminal window and running the command pinout. This tool is provided by the GPIO Zero Python library, which is installed by default in Raspberry Pi OS.
While connecting up simple components to the GPIO pins is perfectly safe, it’s important to be careful how you wire things up. LEDs should have resistors to limit the current passing through them. Do not use 5V for 3.3V components. Do not connect motors directly to the GPIO pins, instead use an H-bridge circuit or a motor controller board.
In order to use the GPIO ports your user must be a member of the gpio group. The pi user is a member by default, other users need to be added manually.
Using the GPIO Zero library makes it easy to get started with controlling GPIO devices with Python. The library is comprehensively documented at gpiozero.readthedocs.io.
You can find more information on how to program electronics connected to your Raspberry Pi with the GPIO Zero Python library in the Raspberry Pi Press book Simple Electronics with GPIO Zero. Written by Phil King, it is part of the MagPi Essentials series published by Raspberry Pi Press. The book gets you started with the GPIO Zero library, and walks you through how to use it by building a series of projects.
The Compliance Support programme is designed to eliminate the burden of navigating compliance issues and make it easier for companies to bring new products to consumers. It provides access to the same test engineers who worked on our Raspberry Pis during their compliance testing, connecting the user to a dedicated team at UL who assess and test the user’s product, facilitated by their in-depth knowledge of Raspberry Pi.
The Powered by Raspberry Pi progamme provides a process for companies wanting to use a form of the Raspberry Pi logo, and covers products with Raspberry Pi computers or silicon inside, and services provided by a Raspberry Pi. If you wish to start the process to apply you can do so online.
All Raspberry Pi models perform a degree of thermal management to avoid overheating under heavy load. The SoCs have an internal temperature sensor, which software on the GPU polls to ensure that temperatures do not exceed a predefined limit; this is 85°C on all models. It is possible to set this to a lower value, but not to a higher one. As the device approaches the limit, various frequencies and sometimes voltages used on the chip (ARM, GPU) are reduced. This reduces the amount of heat generated, keeping the temperature under control.
For Raspberry Pi 3 Model B+, the PCB technology has been changed to provide better heat dissipation and increased thermal mass. In addition, a soft temperature limit has been introduced, with the goal of maximising the time for which a device can "sprint" before reaching the hard limit at 85°C. When the soft limit is reached, the clock speed is reduced from 1.4GHz to 1.2GHz, and the operating voltage is reduced slightly. This reduces the rate of temperature increase: we trade a short period at 1.4GHz for a longer period at 1.2GHz. By default, the soft limit is 60°C, and this can be changed via the temp_soft_limit setting in config.txt.
The Raspberry Pi 4 Model B, continues with the same PCB technology as the Raspberry Pi 3 Model B+, to help dissipate excess heat. There is currently no soft limit defined.
Raspberry Pi 4 devices implement Dynamic Voltage and Frequency Scaling (DVFS). This technique allows Raspberry Pi 4 devices to run at lower temperatures whilst still providing the same performance.
Due to the architecture of the SoCs used on the Raspberry Pi range, and the use of the upstream temperature monitoring code in the Raspberry Pi OS distribution, Linux-based temperature measurements can be inaccurate. However, the vcgencmd command provides an accurate and instantaneous reading of the current SoC temperature as it communicates with the GPU directly:
Whilst heatsinks are not necessary to prevent overheating damage to the SoC — the thermal throttling mechanism handles that — a heatsink or small fan will help if you wish to reduce the amount of thermal throttling that takes place. Depending on the exact circumstances, mounting the Raspberry Pi vertically can also help with heat dissipation, as doing so can improve air flow.
Raspberry Pi 4, 400 and Compute Module 4 computers use an EEPROM to boot the system. All other models of Raspberry Pi computer use the bootcode.bin file located in the boot filesystem.
The scripts and pre-compiled binaries used to create the rpi-eeprom package which is used to update the Raspberry Pi 4 bootloader and VLI USB controller EEPROMs is available on Github.
Raspberry Pi OS automatically updates the bootloader for critical bug fixes. The recommended methods for manually updating the bootloader or changing the boot modes are Raspberry Pi Imager and raspi-config
The boot behaviour (e.g. SD or USB boot) is controlled by a configuration file embedded in the EEPROM image and can be modified via the rpi-eeprom-config tool.
The following command loads the current EEPROM configuration into a text editor. When the editor is closed, rpi-eeprom-config applies the updated configuration to latest available EEPROM release and uses rpi-eeprom-update to schedule an update when the system is rebooted:
The following command applies boot.conf to the latest available EEPROM image and uses rpi-eeprom-update to schedule an update when the system is rebooted.
The rpi-eeprom-update systemd service runs at startup and applies an update if a new image is available, automatically migrating the current bootloader configuration.
If the FREEZE_VERSION bootloader EEPROM config is set then the EEPROM update service will skip any automatic updates. This removes the need to individually disable the EEPROM update service if there are multiple operating systems installed or when swapping SD-cards.
Raspberry Pi OS uses the rpi-eeprom-update script to implement an automatic update service. The script can also be run interactively or wrapped to create a custom bootloader update service.
The -d flag instructs rpi-eeprom-update to use the configuration in the specified image file instead of automatically migrating the current configuration.
The firmware release status corresponds to a particular subdirectory of bootloader firmware images (/lib/firmware/raspberrypi/bootloader/...), and can be changed to select a different release stream.
Since the release status string is just a subdirectory name, then it is possible to create your own release streams e.g. a pinned release or custom network boot configuration.
You can change which release stream is to be used during an update by editing the /etc/default/rpi-eeprom-update file and changing the FIRMWARE_RELEASE_STATUS entry to the appropriate stream.
If the bootloader update image is called pieeprom.upd then recovery.bin is renamed to recovery.000 once the update has completed, then the system is rebooted. Since recovery.bin is no longer present the ROM loads the newly updated bootloader from EEPROM and the OS is booted as normal.
If the bootloader update image is called pieeprom.bin then recovery.bin will stop after the update has completed. On success the HDMI output will be green and the green activity LED is flashed rapidly. If the update fails, the HDMI output will be red and an error code will be displayed via the activity LED.
The BCM2711 ROM does not support loading recovery.bin from USB mass storage or TFTP. Instead, newer versions of the bootloader support a self-update mechanism where the bootloader is able to reflash the EEPROM itself. See ENABLE_SELF_UPDATE on the bootloader configuration page.
Starting with version 2020-04-16 of the Raspberry Pi 4 bootloader, diagnostic information can be displayed at boot time on an HDMI display. To see this diagnostic information, power down the Raspberry Pi 4, remove the SD card, then power back up. A diagnostic display similar to below should appear on the attached display.
The Raspberry Pi has a number of different stages of booting. This document explains how the boot modes work, and which ones are supported for Linux booting.
USB host and Ethernet boot can be performed by BCM2837-based Raspberry Pis - that is, Raspberry Pi 2B version 1.2, Raspberry Pi 3B, and Raspberry Pi 3B+ (Raspberry Pi 3A+ cannot net boot since it does not have a built-in Ethernet interface). In addition, all Raspberry Pi models except Raspberry Pi 4B can use a new bootcode.bin-only method to enable USB host boot.
The Raspberry Pi 4B does not use the bootcode.bin file - instead the bootloader is located in an on-board EEPROM chip. See Raspberry Pi 4 Bootflow and SPI Boot EEPROM.
Format an SD card as FAT32 and copy on the latest bootcode.bin. The SD card must be present in the Raspberry Pi for it to boot. Once bootcode.bin is loaded from the SD card, the Raspberry Pi continues booting using USB host mode.
This is useful for the Raspberry Pi 1, 2, and Zero models, which are based on the BCM2835 and BCM2836 chips, and in situations where a Raspberry Pi 3 fails to boot (the latest bootcode.bin includes additional bugfixes for the Raspberry Pi 3B, compared to the boot code burned into the BCM2837A0).
Next, connect a suitable USB serial cable to your host computer (a Raspberry Pi will work, although I find the easiest path is to use a USB serial cable since it’ll work out the box without any pesky config.txt settings). Use the standard pins 6, 8 and 10 (GND, GPIO14, GPIO15) on a Raspberry Pi or Compute Module board.
Setup your serial to receive at 115200-8-N-1, and then boot your Raspberry Pi / Compute Module. You should get an immediate serial output from the device as bootcode.bin runs.
The following boot sequence applies to the BCM2837 and BCM2837B0 based models of Raspberry Pi only. On models prior to this, the Raspberry Pi will try SD card boot, followed by USB device mode boot. For the Raspberry Pi 4 boot sequence please see the Raspberry Pi 4 boot flow section.
USB boot defaults on the Raspberry Pi 3 will depend on which version is being used. See this page for information on enabling USB boot modes when not enabled by default.
When the BCM2837 boots, it uses two different sources to determine which boot modes to enable. Firstly, the OTP (one-time programmable) memory block is checked to see which boot modes are enabled. If the GPIO boot mode setting is enabled, then the relevant GPIO lines are tested to select which of the OTP-enabled boot modes should be attempted. Note that GPIO boot mode can only be used to select boot modes that are already enabled in the OTP. See GPIO boot mode for details on configuring GPIO boot mode. GPIO boot mode is disabled by default.
If there is no SD card inserted, the SD boot mode takes five seconds to fail. To reduce this and fall back to USB more quickly, you can either insert an SD card with nothing on it or use the GPIO bootmode OTP setting described above to only enable USB.
The default pull for the GPIOs is defined on page 102 of the ARM Peripherals datasheet. If the value at boot time does not equal the default pull, then that boot mode is enabled.
USB enumeration is a means of enabling power to the downstream devices on a hub, then waiting for the device to pull the D+ and D- lines to indicate if it is either USB 1 or USB 2. This can take time: on some devices it can take up to three seconds for a hard disk drive to spin up and start the enumeration process. Because this is the only way of detecting that the hardware is attached, we have to wait for a minimum amount of time (two seconds). If the device fails to respond after this maximum timeout, it is possible to increase the timeout to five seconds using program_usb_boot_timeout=1 in config.txt.
The primary SD card boot mode is, as standard, set to be GPIOs 49-53. It is possible to boot from the secondary SD card on a second set of pins, i.e. to add a secondary SD card to the GPIO pins. However, we have not yet enabled this ability.
The USB device boot mode is enabled by default at the time of manufacture, but the USB host boot mode is only enabled with program_usb_boot_mode=1. Once enabled, the processor will use the value of the OTGID pin on the processor to decide between the two modes. On any Raspberry Pi Model B / B+, the OTGID pin is driven to "0" and therefore will only boot via host mode once enabled (it is not possible to boot through device mode because the LAN951x device is in the way).
The USB will boot as a USB device on the Raspberry Pi Zero or Compute Module if the OTGID pin is left floating (when plugged into a PC for example), so you can "squirt" the bootcode.bin into the device. The usbboot code for doing this is available on Github.
The main difference between this and previous products is that the second stage bootloader is loaded from an SPI flash EEPROM instead of the bootcode.bin file on previous products.
The bootloader may also be updated before the firmware is started if a pieeprom.upd file is found. Please see the bootloader EEPROM page for more information about bootloader updates.
tryboot is supported on all Raspberry Pi models, however, on Raspberry Pi 4 Model B revision 1.0 and 1.1 the EEPROM must not be write protected. This is because older Raspberry Pi 4B devices have to reset the power supply (losing the tryboot state) so this is stored inside the EEPROM instead.
If 1 and WAKE_ON_GPIO=0 then sudo halt will switch off all PMIC outputs. This is lowest possible power state for halt but may cause problems with some HATs because 5V will still be on. GLOBAL_EN must be shorted to ground to boot.
Raspberry Pi 400 has a dedicated power button which operates even if the processor is switched off. This behaviour is enabled by default, however, WAKE_ON_GPIO=2 may be set to use an external GPIO power button instead of the dedicated power button.
RPIBOOT is intended for use with Compute Module 4 to load a custom debug image (e.g. a Linux RAM-disk) instead of the normal boot. This should be the last boot option because it does not currently support timeouts or retries.
In order to support unique TFTP boot directories for each Raspberry Pi the bootloader prefixes the filenames with a device specific directory. If neither start4.elf nor start.elf are found in the prefixed directory then the prefix is cleared.
On earlier models the serial number is used as the prefix, however, on Raspberry Pi 4 the MAC address is no longer generated from the serial number making it difficult to automatically create tftpboot directories on the server by inspecting DHCPDISCOVER packets. To support this the TFTP_PREFIX may be customized to either be the MAC address, a fixed value or the serial number (default).
the concatenation of the fourcc for RPi4 (0x34695052 - little endian), the board revision (e.g. 0x00c03111) (4-bytes), the least significant 4 bytes of the mac address and the 4-byte serial number.
This is intended to be unique but also provide structured information to the DHCP server, allowing Raspberry Pi 4 computers to be identified without relying upon the Ethernet MAC OUID.
If TFTP_IP and the following options are set then DHCP is skipped and the static IP configuration is applied. If the TFTP server is on the same subnet as the client then GATEWAY may be omitted.
Previously this property was only checked by the rpi-eeprom-update script. However, now that self-update is enabled the bootloader will also check this property. If set to 1, this overrides ENABLE_SELF_UPDATE to stop automatic updates. To disable FREEZE_VERSION you will have to use an SD card boot with recovery.bin.
You can use this property to change the port used for network install and HTTP boot. HTTPS is enabled when using the default host fw-download-alias1.raspberrypi.com. If HTTP_HOST is changed then HTTPS is disabled and plain HTTP will be used instead.
One way to view the data is to connect the test Raspberry Pi 4 to another Raspberry Pi running WireShark and select “udp.srcport == 6665” as a filter and select Analyze -> Follow -> UDP stream to view as an ASCII log.
A list of up to 4 VID/PID pairs specifying devices which the bootloader should ignore. If this matches a HUB then the HUB won’t be enumerated, causing all downstream devices to be excluded.
If the VL805 property is set to 1 then the bootloader will search for a VL805 PCIe XHCI controller and attempt to initialise it with VL805 firmware embedded in the bootloader EEPROM. This enables industrial designs to use VL805 XHCI controllers without providing a dedicated SPI EEPROM for the VL805 firmware.
On Compute Module 4 the bootloader never writes to the dedicated VL805 SPI EEPROM. This option just configures the controller to load the firmware from SDRAM.
Do not use this option if the VL805 XHCI controller has a dedicated EEPROM. It will fail to initialise because the VL805 ROM will attempt to use a dedicated SPI EEPROM if fitted.
The embedded VL805 firmware assumes the same USB configuration as Raspberry Pi 4B (2 USB 3.0 ports and 4 USB 2.0 ports). There is no support for loading alternate VL805 firmware images, a dedicated VL805 SPI EEPROM should be used instead for such configurations.
If erase_eeprom is set to 1 then recovery.bin will erase the entire SPI EEPROM instead of flashing the bootloader image. This property has no effect during a normal boot.
This option must be used in conjunction with the EEPROM /WP pin which controls updates to the EEPROM Write Status Register. Pulling /WP low (CM4 EEPROM_nEP or Pi4B TP5) does NOT write-protect the EEPROM unless the Write Status Register has also been configured.
This option may be set to 0 to block self-update without requiring the EEPROM configuration to be updated. This is sometimes useful when updating multiple Raspberry Pis via network boot because this option can be controlled per Raspberry Pi (e.g. via a serial number filter in config.txt).
The following config.txt properties are used to program the secure-boot OTP settings. These changes are irreversible and can only be programmed via RPIBOOT when flashing the bootloader EEPROM image. This ensures that secure-boot cannot be set remotely or by accidentally inserting a stale SD card image.
Since there is no dedicated nRPIBOOT jumper on Raspberry Pi 4B or Raspberry Pi 400, an alternative GPIO must be used to select RPIBOOT mode by pulling the GPIO low. Only one GPIO may be selected and the available options are 2, 4, 5, 7, 8. This property does not depend on secure-boot but please verify that this GPIO configuration does not conflict with any HATs which might pull the GPIO low during boot.
Since for safety this property can only be programmed via RPIBOOT, the bootloader EEPROM must first be cleared using erase_eeprom. This causes the BCM2711 ROM to failover to RPIBOOT mode, which then allows this option to be set.
If you run rpi-eeprom-update again after your Raspberry Pi has rebooted, you should now see that the CURRENT date has updated to indicate that you are using the latest version of the bootloader.
The choice between the two boot modes is made by the firmware at boot time when it reads the OTP bits. There are two bits to control USB boot: the first enables USB device boot and is enabled by default. The second enables USB host boot; if the USB host boot mode bit is set, then the processor reads the OTGID pin to decide whether to boot as a host (driven to zero as on any Raspberry Pi Model B / B+) or as a device (left floating). The Raspberry Pi Zero has access to this pin through the OTGID pin on the USB connector, and the Compute Module has access to this pin on the edge connector.
When this boot mode is activated (usually after a failure to boot from the SD card), the Raspberry Pi puts its USB port into device mode and awaits a USB reset from the host. Example code showing how the host needs to talk to the Raspberry Pi can be found on Github.
This page explains how to boot your Raspberry Pi from a USB mass storage device such as a flash drive or a USB hard disk. When attaching USB devices, particularly hard disks and SSDs, be mindful of their power requirements. If you wish to attach more than one SSD or hard disk to the Raspberry Pi, this normally requires external power - either a powered hard disk enclosure, or a powered USB hub. Note that models prior to the Raspberry Pi 4B have known issues which prevent booting with some USB devices.
The bootloader in Raspberry Pi 400 and newer Raspberry Pi 4B boards support USB boot by default, although the BOOT_ORDER bootloader configuration may need to be modified. On earlier Raspberry Pi 4B boards, or to select alternate boot modes, the bootloader must be updated.
On the Raspberry Pi 2B v1.2, 3A+, 3B, Zero 2 W, and Compute Module 3, 3+ you must first enable USB host boot mode. This is to allow USB mass storage boot, and network boot. Note that network boot is not supported on the Raspberry Pi 3A+ or Zero 2 W.
To enable USB host boot mode, the Raspberry Pi needs to be booted from an SD card with a special option to set the USB host boot mode bit in the one-time programmable (OTP) memory. Once this bit has been set, the SD card is no longer required.
Note that although the option is named program_usb_boot_mode, it only enables USB host boot mode. USB device boot mode is only available on certain models of Raspberry Pi - see USB device boot mode.
Check that the output 0x3020000a is shown. If it is not, then the OTP bit has not been successfully programmed. In this case, go through the programming procedure again. If the bit is still not set, this may indicate a fault in the Raspberry Pi hardware itself.
If you wish, you can remove the program_usb_boot_mode line from config.txt, so that if you put the SD card into another Raspberry Pi, it won’t program USB host boot mode. Make sure there is no blank line at the end of config.txt.
After preparing the storage device, connect the drive to the Raspberry Pi and power up the Raspberry Pi, being aware of the extra USB power requirements of the external drive.
After five to ten seconds, the Raspberry Pi should begin booting and show the rainbow splash screen on an attached display. Make sure that you do not have an SD card inserted in the Raspberry Pi, since if you do, it will boot from that first.
If you are unable to use a particular USB device to boot your Raspberry Pi, an alternative for the Raspberry Pi 2B v1.2, 3A+, 3B and 3B+ is to use the special bootcode.bin-only boot mode. The Raspberry Pi will still boot from the SD card, but bootcode.bin is the only file read from it.
Spinning hard disk drives nearly always require a powered USB hub. Even if it appears to work, you are likely to encounter intermittent failures without a powered USB HUB.
This section describes how network booting works on the Raspberry Pi 3B, 3B+ and 2B v1.2. On the Raspberry Pi 4 network booting is implemented in the second stage bootloader in the EEPROM. Please see the Raspberry Pi 4 Bootloader Configuration page for more information.
We also have a tutorial about setting up a network boot system. Network booting works only for the wired adapter built into the above models of Raspberry Pi. Booting over wireless LAN is not supported, nor is booting from any other wired network device.
From this point the bootcode.bin code continues to load the system. The first file it will try to access is [serial_number]/start.elf. If this does not result in an error then any other files to be read will be pre-pended with the serial_number. This is useful because it enables you to create separate directories with separate start.elf / kernels for your Raspberry Pis.
To get the serial number for the device you can either try this boot mode and see what file is accessed using tcpdump / wireshark, or you can run a standard Raspberry Pi OS SD card and cat /proc/cpuinfo.
The first thing to check is that the OTP bit is correctly programmed. To do this, you need to add program_usb_boot_mode=1 to config.txt and reboot (with a standard SD card that boots correctly into Raspberry Pi OS). Once you’ve done this, you should be able to do:
To capture the ethernet packets on the server, use tcpdump on the tftpboot server (or DHCP server if they are different). You will need to capture the packets there otherwise you will not be able to see packets that get sent directly because network switches are not hubs!
You will know whether the Vendor Option is correctly specified: if it is, you’ll see a subsequent TFTP RRQ packet being sent. RRQs can be replied to by either the first block of data or an error saying file not found. In a couple of cases they even receive the first packet and then the transmission is aborted by the Raspberry Pi (this happens when checking whether a file exists). The example below is just three packets: the original read request, the first data block (which is always 516 bytes containing a header and 512 bytes of data, although the last block is always less than 512 bytes and may be zero length), and the third packet (the ACK which contains a frame number to match the frame number in the data block).
The Raspberry Pi will attempt a DHCP request five times with five seconds in between, for a total period of 25 seconds. If the server is not available to respond in this time, then the Raspberry Pi will drop into a low-power state. There is no workaround for this other than bootcode.bin on an SD card.
The Raspberry Pi will only respond to ARP requests when it is in the initialisation phase; once it has begun transferring data, it’ll fail to continue responding.
At boot time, Raspberry Pi broadcasts a DHCPDISCOVER packet. The DHCP server replies with a DHCPOFFER packet. The Raspberry Pi then continues booting without doing a DHCPREQUEST or waiting for DHCPACK. This may result in two separate devices being offered the same IP address and using it without it being properly assigned to the client.
Different DHCP servers have different behaviours in this situation. dnsmasq (depending upon settings) will hash the MAC address to determine the IP address, and ping the IP address to make sure it isn’t already in use. This reduces the chances of this happening because it requires a collision in the hash.
The Raspberry Pi can be configured to allow the boot mode to be selected at power on using hardware attached to the GPIO connector: this is GPIO boot mode. This is done by setting bits in the OTP memory of the SoC. Once the bits are set, they permanently allocate 5 GPIOs to allow this selection to be made. Once the OTP bits are set they cannot be unset so you should think carefully about enabling this, since those 5 GPIO lines will always control booting. Although you can use the GPIOs for some other function once the Raspberry Pi has booted, you must set them up so that they enable the desired boot modes when the Raspberry Pi boots.
Where n is the bank of GPIOs which you wish to use. Then reboot the Raspberry Pi once to program the OTP with this setting. Bank 1 is GPIOs 22-26, bank 2 is GPIOs 39-43. Unless you have a Compute Module, you must use bank 1: the GPIOs in bank 2 are only available on the Compute Module. Because of the way the OTP bits are arranged, if you first program GPIO boot mode for bank 1, you then have the option of selecting bank 2 later. The reverse is not true: once bank 2 has been selected for GPIO boot mode, you cannot select bank 1.
Once GPIO boot mode is enabled, the Raspberry Pi will no longer boot. You must pull up at least one boot mode GPIO pin in order for the Raspberry Pi to boot.
SD0 is the Broadcom SD card / MMC interface. When the boot ROM within the SoC runs, it always connects SD0 to the built-in microSD card slot. On Compute Modules with an eMMC device, SD0 is connected to that; on the Compute Module Lite SD0 is available on the edge connector and connects to the microSD card slot in the CMIO carrier board. SD1 is the Arasan SD card / MMC interface which is also capable of SDIO. All Raspberry Pi models with built-in wireless LAN use SD1 to connect to the wireless chip via SDIO.
The default pull resistance on the GPIO lines is 50K ohm, as documented on page 102 of the BCM2835 ARM peripherals datasheet. A pull resistance of 5K ohm is recommended to pull a GPIO line up: this will allow the GPIO to function but not consume too much power.
The latest version of Raspberry Pi OS supports booting from NVMe drives. To check that your NVMe drive is connected correctly, boot Raspberry Pi OS from another drive and run ls -l /dev/nvme*; example output is shown below.
To boot from NVMe you need a recent version of the bootloader (after July 2021), and a recent version of the VideoCore firmware and Raspberry Pi OS Linux kernel. The latest Raspberry Pi OS release has everything you need, so you can use the Raspberry Pi Imager to install the software to your SSD.
You might need to use rpiboot to update the CM4 bootloader. Instructions for building rpiboot and configuring the IO board to switch the ROM to usbboot mode are in the usbboot Github repository.
You must have the latest versions of the VideoCore firmware and Raspberry Pi OS Linux kernel to boot directly from an NVMe SSD disk. The Raspberry Pi Bullseye and Buster Legacy releases have everything needed.
This boot behaviour is controlled via the BOOT_ORDER setting in the EEPROM configuration: we have added a new boot mode 6 for NVMe. See Raspberry Pi 4 Bootloader Configuration.
If the boot process fails, please file an issue on the rpi-eeprom Github repository, including a copy of the console and anything displayed on the screen during boot.
You could for example add this to your BOOT_ORDER as a fall-back boot method, or put it behind a GPIO conditional to initiate HTTP boot from your own server when a GPIO pin is pulled low.
To use HTTP boot you need to use the LATEST / STABLE bootloader configuration and update to a bootloader dated 10th March 2022 or later. HTTP boot only works over ethernet, so you need to connect your Raspberry Pi to your network via an Ethernet cable, e.g. to a socket on the back of your router.
All HTTP downloads must be signed. The bootloader includes a public key for the files on the default host fw-download-alias1.raspberrypi.com. This key will be used to verify the network install image unless you set HTTP_HOST and include a public key in the eeprom. This allows you to host the Raspberry Pi network install images on your own server.
An up-to-24-bit parallel RGB interface is available on all Raspberry Pi boards with the 40 way header and the Compute Modules. This interface allows parallel RGB displays to be attached to the Raspberry Pi GPIO either in RGB24 (8 bits for red, green and blue) or RGB666 (6 bits per colour) or RGB565 (5 bits red, 6 green, and 5 blue).
One of the alternate functions selectable on bank 0 of the Raspberry Pi GPIO is DPI (Display Parallel Interface) which is a simple clocked parallel interface (up to 8 bits of R, G and B; clock, enable, hsync, and vsync). This interface is available as alternate function 2 (ALT2) on GPIO bank 0:
There are various ways that the colour values can be presented on the DPI output pins in either 565, 666, or 24-bit modes (see the following table and the output_format part of the dpi_output_format parameter below):
Note that all other peripheral overlays that use conflicting GPIO pins must be disabled. In config.txt, take care to comment out or invert any dtparams that enable I2C or SPI:
The output format (clock, colour format, sync polarity, enable) can be controlled with a magic number (unsigned integer or hex value prefixed with 0x) passed to the dpi_output_format parameter in config.txt created from the following fields:
In firmware dated August 2018 or later, the hdmi_timings config.txt entry that was previously used to set up the DPI timings has be superseded by a new dpi_timings parameter. If the dpi_timings parameter is not present, the system will fall back to using the hdmi_timings parameter to ensure backwards compatibility. If neither are present and a custom mode is requested, then a default set of parameters for VGAp60 is used.
The dpi_group and dpi_mode config.txt parameters are used to set either predetermined modes (DMT or CEA modes as used by HDMI) or a user can generate custom modes.
dpi_timings=
A Linux Device Tree overlay is used to switch the GPIO pins into the correct mode (alt function 2). As previously mentioned, the GPU is responsible for driving the DPI display. Hence there is no Linux driver; the overlay simply sets the GPIO alt functions correctly.
A "full fat" DPI overlay (dpi24.dtb) is provided which sets all 28 GPIOs to ALT2 mode, providing the full 24 bits of colour bus as well as the h and v-sync, enable and pixel clock. Note this uses all of the bank 0 GPIO pins.
A second overlay (vga666.dtb) is provided for driving VGA monitor signals in 666 mode which don’t need the clock and DE pins (GPIO 0 and 1) and only require GPIOs 4-21 for colour (using mode 5).
These overlays are fairly trivial and a user can edit them to create a custom overlay to enable just the pins required for their specific use case. For example, if one was using a DPI display using vsync, hsync, pclk, and de but in RGB565 mode (mode 2), then the dpi24.dtb overlay could be edited so that GPIOs 20-27 were not switched to DPI mode and hence could be used for other purposes.
General Purpose I/O (GPIO) pins can be configured as either general-purpose input, general-purpose output, or as one of up to six special alternate settings, the functions of which are pin-dependent.
The GPIO connections on the BCM2835 package are sometimes referred to in the peripherals data sheet as "pads" — a semiconductor design term meaning "chip connection to outside world".
All GPIO pins revert to general-purpose inputs on power-on reset. The default pull states are also applied, which are detailed in the alternate function table in the ARM peripherals datasheet. Most GPIOs have a default pull applied.
Each GPIO pin, when configured as a general-purpose input, can be configured as an interrupt source to the ARM. Several interrupt generation sources are configurable:
The normal rising/falling edge detection has a small amount of synchronisation built into the detection. At the system clock frequency, the pin is sampled with the criteria for generation of an interrupt being a stable transition within a three-cycle window, i.e. a record of "1 0 0" or "0 1 1". Asynchronous detection bypasses this synchronisation to enable the detection of very narrow events.
Almost all of the GPIO pins have alternative functions. Peripheral blocks internal to the SoC can be selected to appear on one or more of a set of GPIO pins, for example the I2C buses can be configured to at least 3 separate locations. Pad control, such as drive strength or Schmitt filtering, still applies when the pin is configured as an alternate function.
The table below gives the various voltage specifications for the GPIO pins for BCM2835, BCM2836, BCM2837 and RP3A0-based products (e.g. Raspberry Pi Zero or Raspberry Pi 3+). For information about Compute Modules you should see the relevant datasheets.
The table below gives the various voltage specifications for the GPIO pins for BCM2711-based products (e.g. Raspberry Pi 4 and Raspberry Pi 400). For information about Compute Modules you should see the relevant datasheets.
GPIO drive strengths do not indicate a maximum current, but a maximum current under which the pad will still meet the specification. You should set the GPIO drive strengths to match the device being attached in order for the device to work correctly.
The Raspberry Pi 3.3V supply was designed with a maximum current of ~3mA per GPIO pin. If you load each pin with 16mA, the total current is 272mA. The 3.3V supply will collapse under that level of load.
Big current spikes will happen, especially if you have a capacitive load. That will "bounce" around all the other pins near it. It is likely to cause interference with the SD card or even the SDRAM behaviour.
Beware of SSO (Simultaneous Switching Outputs) limitations which are device-dependent as well as dependent on the quality and layout of the PCB, the amount and quality of the decoupling capacitors, the type of load on the pads (resistance, capacitance), and other factors beyond the control of Raspberry Pi.
If there is no kernel driver available, and a program needs to access a peripheral address directly with mmap, it needs to know where in the virtual memory map the peripheral bus segment has been placed. This varies according to which model of Raspberry Pi is being used, so there are three helper functions in bcm_host.c to help provide platform independence.
The Raspberry Pi is often used as part of another product. This documentation describes some extra facilities available to use other capabilities of the Raspberry Pi.
The device private key rows can only be read via the vcmailbox command which requires access to /dev/vcio which is restricted to the video group on Raspberry Pi OS.
Raspberry Pi computers do not have a hardware protected key store. It is recommended that this feature is used in conjunction with secure-boot in order to restrict access to this data.
The rpi-otp-private-key script wraps the device private key vcmailbox APIs in order to make it easier to read/write a key in the same format as OpenSSL.
This is available via device-tree in /proc/device-tree/chosen/rpi-boardrev-ext and for testing purposes this OTP value can be temporarily overridden by setting board_rev_ext in config.txt.
The power supply requirements differ by Raspberry Pi model. All models require a 5.1V supply, but the current required generally increases according to model. All models up to the Raspberry Pi 3 require a micro USB power connector, whilst the Raspberry Pi 4 and Raspberry Pi 400 use a USB-C connector.
Exactly how much current (mA) the Raspberry Pi requires is dependent on what you connect to it. The following table gives various current requirements.
From the Raspberry Pi B+ onwards, 1.2A is supplied to downstream USB peripherals. This allows the vast majority of USB devices to be connected directly to these models, assuming the upstream power supply has sufficient available current.
Very high-current devices, or devices which can draw a surge current such as certain modems and USB hard disks, will still require an external powered USB hub. The power requirements of the Raspberry Pi increase as you make use of the various interfaces on the Raspberry Pi. The GPIO pins can draw 50mA safely (note that that means 50mA distributed across all the pins: an individual GPIO pin can only safely draw 16mA), the HDMI port uses 50mA, the Camera Module requires 250mA, and keyboards and mice can take as little as 100mA or as much as 1000mA! Check the power rating of the devices you plan to connect to the Raspberry Pi and purchase a power supply accordingly. If you’re not sure, we would advise you to buy a powered USB hub.
For these measurements we used a standard Raspberry Pi OS image (current as of 26 Feb 2016, or June 2019 for the Raspberry Pi 4), at room temperature, with the Raspberry Pi connected to a HDMI monitor, USB keyboard, and USB mouse. The Raspberry Pi 3 Model B was connected to a wireless LAN access point, the Raspberry Pi 4 was connected to Ethernet. All these power measurements are approximate and do not take into account power consumption from additional USB devices; power consumption can easily exceed these measurements if multiple additional USB devices or a HAT are connected to the Raspberry Pi.
On all models of Raspberry Pi since the Raspberry Pi B+ (2014) except the Zero range, there is low-voltage detection circuitry that will detect if the supply voltage drops below 4.63V (+/- 5%). This will result in a warning icon being displayed on all attached displays and an entry being added to the kernel log.
If you are seeing warnings, you should improve the power supply and/or cable, as low power can cause problems with corruption of SD cards, or erratic behaviour of the Raspberry Pi itself; for example, unexplained crashes.
The USB specification requires that USB devices must not supply current to upstream devices. If a USB device does supply current to an upstream device then this is called back-powering. Often this happens when a badly-made powered USB hub is connected, and will result in the powered USB hub supplying power to the host Raspberry Pi. This is not recommended since the power being supplied to the Raspberry Pi via the hub will bypass the protection circuitry built into the Raspberry Pi, leaving it vulnerable to damage in the event of a power surge.
Raspberry Pi computers are equipped with a number of SPI buses. SPI can be used to connect a wide variety of peripherals - displays, network controllers (Ethernet, CAN bus), UARTs, etc. These devices are best supported by kernel device drivers, but the spidev API allows userspace drivers to be written in a wide array of languages.
SPI0, with two hardware chip selects, is available on the header of all Raspberry Pis; there is also an alternate mapping that is only available on Compute Modules.
On the Raspberry Pi 4, 400 and Compute Module 4 there are four additional SPI buses: SPI3 to SPI6, each with 2 hardware chip selects. These extra SPI buses are available via alternate function assignments on certain GPIO pins - see the BCM2711 ARM Peripherals datasheet.
In bidirectional SPI mode the same SPI standard is implemented, except that a single wire is used for data (MOMI) instead of the two used in standard mode (MISO and MOSI). In this mode, the MOSI pin serves as MOMI pin.
The LoSSI standard allows issuing of commands to peripherals (LCD) and to transfer data to and from them. LoSSI commands and parameters are 8 bits long, but an extra bit is used to indicate whether the byte is a command or parameter/data. This extra bit is set high for a data and low for a command. The resulting 9-bit value is serialized to the output. LoSSI is commonly used with MIPI DBI type C compatible LCD controllers.
SPI0 is disabled by default. To enable it, use raspi-config, or ensure the line dtparam=spi=on is not commented out in /boot/config.txt. By default it uses 2 chip select lines, but this can be reduced to 1 using dtoverlay=spi0-1cs. dtoverlay=spi0-2cs also exists, and without any parameters it is equivalent to dtparam=spi=on.
The driver does not make use of the hardware chip select lines because of some limitations - instead it can use an arbitrary number of GPIOs as software/GPIO chip selects. This means you are free to choose any spare GPIO as a CS line, and all of these SPI overlays include that control - see /boot/overlays/README for details, or run (for example) dtoverlay -h spi0-2cs (dtoverlay -a | grep spi might be helpful to list them all).
The driver supports all speeds which are even integer divisors of the core clock, although as said above not all of these speeds will support data transfer due to limits in the GPIOs and in the devices attached. As a rule of thumb, anything over 50MHz is unlikely to work, but your mileage may vary.
Bidirectional or "3-wire" mode is supported by the spi-bcm2835 kernel module. Please note that in this mode, either the tx or rx field of the spi_transfer struct must be a NULL pointer, since only half-duplex communication is possible. Otherwise, the transfer will fail. The spidev_test.c source code does not consider this correctly, and therefore does not work at all in 3-wire mode.
spidev presents an ioctl-based userspace interface to individual SPI CS lines. Device Tree is used to indicate whether a CS line is going to be driven by a kernel driver module or managed by spidev on behalf of the user; it is not possible to do both at the same time. Note that Raspberry Pi’s own kernels are more relaxed about the use of Device Tree to enable spidev - the upstream kernels print warnings about such usage, and ultimately may prevent it altogether.
There are several Python libraries that provide access to spidev, including spidev (pip install spidev - see https://pypi.org/project/spidev/) and SPI-Py (https://github.com/lthiery/SPI-Py).
As with all computers, the USB ports on the Raspberry Pi supply a limited amount of power. Often problems with USB devices are caused by power issues. To rule out insufficient power as the cause of the problem, connect your USB devices to the Raspberry Pi using a powered hub.
The Raspberry Pi 4 contains two USB 3.0 ports and two USB 2.0 ports which are connected to a VL805 USB controller. The USB 2.0 lines on all four ports are connected to a single USB 2.0 hub within the VL805: this limits the total available bandwidth for USB 1.1 and USB 2.0 devices to that of a single USB 2.0 port.
The USB controller on models prior to Raspberry Pi 4 has only a basic level of support for certain devices, which presents a higher software processing overhead. It also supports only one root USB port: all traffic from connected devices is funnelled down this single bus, which operates at a maximum speed of 480Mbps.
The software overhead incurred when talking to low and full speed devices means that there are limitations on the number of simultaneously active low and full speed devices. Small numbers of these types of devices connected to a Raspberry Pi will cause no issues.
There is an issue with USB 3.0 hubs in conjunction with the use of full or low speed devices, including most mice and keyboards. A bug in most USB 3.0 hub hardware means that the models prior to Raspberry Pi 4 cannot talk to full or low speed devices connected to a USB 3.0 hub.
Avoid connecting low or full speed devices into a USB 3.0 hub. As a workaround, plug a USB 2.0 hub into the downstream port of the USB 3.0 hub and connect the low speed device, or use a USB 2.0 hub between the Raspberry Pi and the USB 3.0 hub, then plug low speed devices into the USB 2.0 hub.
Expensive audiophile sound cards typically use large amounts of USB bandwidth: reliable operation with 96kHz/192kHz DACs is not guaranteed. As a workaround, forcing the output stream to be CD quality (44.1kHz/48kHz 16-bit) will reduce the stream bandwidth to reliable levels.
USB 2.0 and 3.0 hubs have a mechanism for talking to full or low speed devices connected to their downstream ports called a transaction translator (TT). This device buffers high speed requests from the host and transmits them at full or low speed to the downstream device. Two configurations of hub are allowed by the USB specification: Single TT (one TT for all ports) and Multi TT (one TT per port). Because of a hardware limitation, if too many full or low speed devices are plugged into a single TT hub, the devices may behave unreliably. It is recommended to use a Multi TT hub to interface with multiple full and low speed devices. As a workaround, spread full and low speed devices out between the Raspberry Pi’s own USB port and the single TT hub.
As of the 4.9 kernel, all Raspberry Pi computers report BCM2835, even those with BCM2836, BCM2837 and BCM2711 processors. You should not use this string to detect the processor. Decode the revision code using the information below, or cat /sys/firmware/devicetree/base/model.
With the launch of the Raspberry Pi 2, new-style revision codes were introduced. Rather than being sequential, each bit of the hex code represents a piece of information about the revision:
Starting from the lowest order bits, the bottom four (0-3) are the board revision number, so this board has a revision of 1. The next eight bits (4-11) are the board type, in this case binary 00010001, hex 11, so this is a Raspberry Pi 4B. Using the same process, we can determine that the processor is a BCM2711, the board was manufactured by Sony UK, and it has 4GB of RAM.
Obviously there are so many programming languages out there it’s not possible to give examples for all of them, but here are two quick examples for C and Python. Both these examples use a system call to run a bash command that gets the cpuinfo and pipes the result to awk to recover the required revision code. They then use bit operations to extract the New, Model, and Memory fields from the code.
Raspberry Pi advises against using the revision code as a whole (c03111) to avoid problems when new board revisions are created. For example, you might consider having a list of supported revision codes in your program, and comparing the detected code with your list to determine if your program is allowed to run. However, this mechanism will break when a new board revision comes out, or if the production location changes, each of which would create a new revision code that’s not in your program’s list. Your program would now reject the unrecognised code, and perhaps abort, even though revisions of the same board type are always backwards-compatible. You would need to release a new version of your program with the specific revision added to the list, which can be a maintenance burden.
A better mechanism is to just use the board-type field (3A, 4B, etc.) to determine which model your program supports; or perhaps just the amount-of-memory field. So you might say you will support any Raspberry Pi 4Bs, whatever their board revision code, because that should always work. Or you might want to restrict your program to 4B devices with 2GB of RAM or more. Simply look at those two fields to determine whether you are going to allow your program to run.
The examples in the previous section use the recommended approach. They pull out the board type and memory size from the revision code, and use them to determine whether or not they are a Raspberry Pi 4B with 2GB or more of RAM.
hello, sorry if this is the wrong forum area, but id like to get some enlightement on wheter it is possible or not to connect this shield http://www.elecfreaks.com/store/lcd-tft ... p-213.html
with an fitting lcd to the gpio pins on raspberry, i have valdodov"s software on my raspberry, and it sets the resolutions correct when booting, but i suppose my main problem is that i can"t connect the pins correctly?
The FBTFT project has support for the ITDB24 display which has a S6D1121 controller, the same controller as the display mentioned in that page: http://www.elecfreaks.com/store/24-tft- ... p-110.html
now i have the notros fbtft"s installed on my raspbpi but i dont know do i have the correct pins connected to my gpio"s, sorry, i dont have the shield anymore on the tft. my screen is this http://www.sunrom.com/704
There"s not enough gpios to use the touchpanel as well. To do that, you need something like this: https://github.com/notro/fbtft/wiki/SPI ... ce-circuit
green and red RPis with RTC, GPS, ADC, TFT display, relay board, RFID, accelerometer, compass, gyro, IO expander, RF transceiver, WIFI dongle, ... just for the fun of it.

Looking for a small screen that is the same size as your Raspberry Pi? This 3.5" resistive touch screen with 480 x 320 resolution will certainly meet your needs. If further combined with a wireless keyboard, It will act as a fully functional computer that fits right in your pocket. Use it to run the Pi"s terminal, to play games, or to browse the web.
This item is more than just a screen, it is also a development friendly platform. It is seamlessly compatible with DFRobot Gravity series modules making it easy to connect or even to debug your Pi via the serial port! All the pins of Pi are left unoccupied, giving you more room to connect jumper wires.
This Touchscreen is well designed for the Raspberry Pi 3, 2 or Model B (with 40 GPIO Pins). Please note that it is not directly compatible with the old 26 pin GPIO Raspberry Pi.
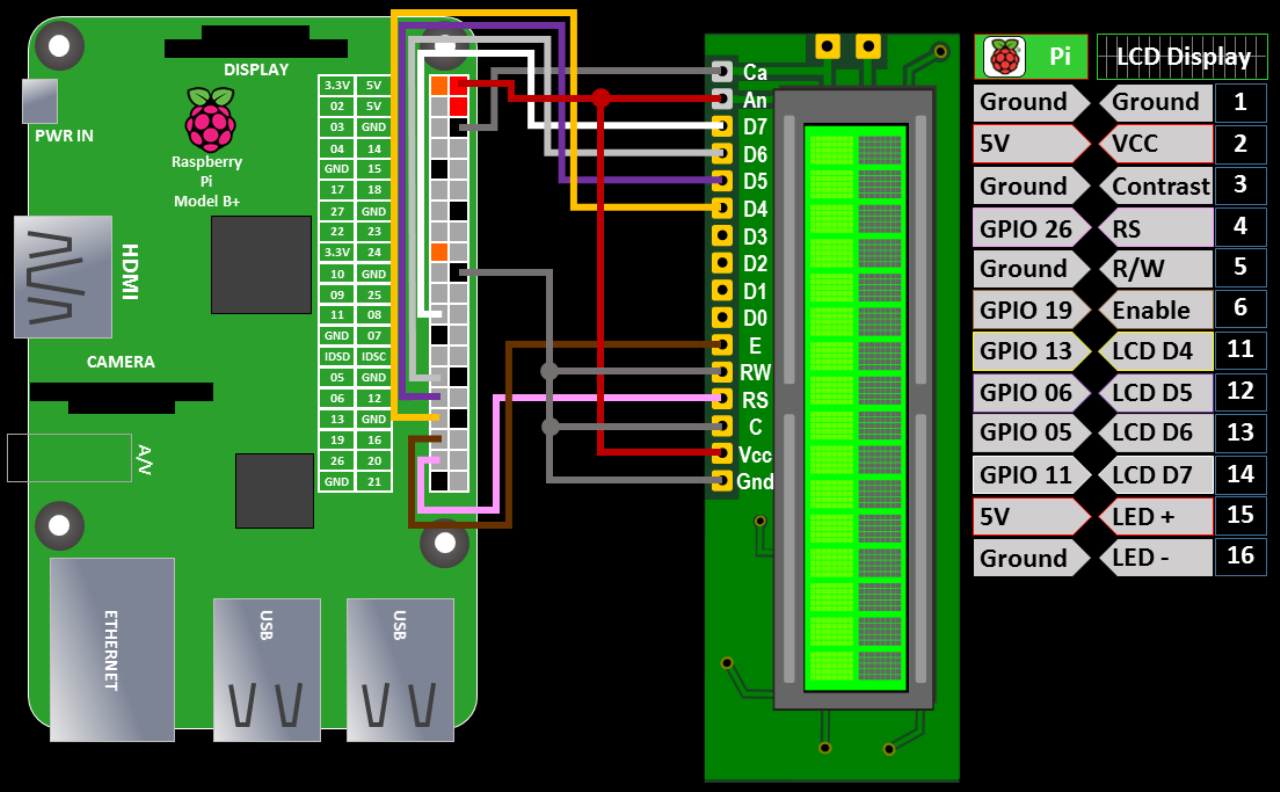
Note: When using the LCD display driver be sure to power off the system using software rather than switching the power off abruptly to avoid damage to the LCD.
As for the raspberry PI 4B and 3B, besides the upgrade of processing performance, the interface has also changed a little. Let"s have a look at it together.
The raspberry PI interface, the raspberry PI 3B interface is the standard HDMI interface, now the Raspberry PI 4B USES micro HDMI, I think it is to reduce the space volume.Another type of screen interface is the mini HDMI interface.Below presents the picture of 3 kinds of interface you can see.

In these videos, the SPI (GPIO) bus is referred to being the bottleneck. SPI based displays update over a serial data bus, transmitting one bit per clock cycle on the bus. A 320x240x16bpp display hence requires a SPI bus clock rate of 73.728MHz to achieve a full 60fps refresh frequency. Not many SPI LCD controllers can communicate this fast in practice, but are constrained to e.g. a 16-50MHz SPI bus clock speed, capping the maximum update rate significantly. Can we do anything about this?
The fbcp-ili9341 project started out as a display driver for the Adafruit 2.8" 320x240 TFT w/ Touch screen for Raspberry Pi display that utilizes the ILI9341 controller. On that display, fbcp-ili9341 can achieve a 60fps update rate, depending on the content that is being displayed. Check out these videos for examples of the driver in action:
Given that the SPI bus can be so constrained on bandwidth, how come fbcp-ili9341 seems to be able to update at up to 60fps? The way this is achieved is by what could be called adaptive display stream updates. Instead of uploading each pixel at each display refresh cycle, only the actually changed pixels on screen are submitted to the display. This is doable because the ILI9341 controller, as many other popular controllers, have communication interface functions that allow specifying partial screen updates, down to subrectangles or even individual pixel levels. This allows beating the bandwidth limit: for example in Quake, even though it is a fast pacing game, on average only about 46% of all pixels on screen change each rendered frame. Some parts, such as the UI stay practically constant across multiple frames.
A hybrid of both Polled Mode SPI and DMA based transfers are utilized. Long sequential transfer bursts are performed using DMA, and when DMA would have too much latency, Polled Mode SPI is applied instead.
Undocumented BCM2835 features are used to squeeze out maximum bandwidth: SPI CDIV is driven at even numbers (and not just powers of two), and the SPI DLEN register is forced in non-DMA mode to avoid an idle 9th clock cycle for each transferred byte.
Good old interlacing is added into the mix: if the amount of pixels that needs updating is detected to be too much that the SPI bus cannot handle it, the driver adaptively resorts to doing an interlaced update, uploading even and odd scanlines at subsequent frames. Once the number of pending pixels to write returns to manageable amounts, progressive updating is resumed. This effectively doubles the maximum display update rate. (If you do not like the visual appearance that interlacing causes, it is easy to disable this by uncommenting the line #define NO_INTERLACING in file config.h)
A number of other micro-optimization techniques are used, such as batch updating rectangular spans of pixels, merging disjoint-but-close spans of pixels on the same scanline, and latching Column and Page End Addresses to bottom-right corner of the display to be able to cut CASET and PASET messages in mid-communication.
The result is that the SPI bus can be kept close to 100% saturation, ~94-97% usual, to maximize the utilization rate of the bus, while only transmitting practically the minimum number of bytes needed to describe each new frame.
although not all boards are actively tested on, so ymmv especially on older boards. (Bug fixes welcome, use https://elinux.org/RPi_HardwareHistory to identify which board you are running on)
This driver does not utilize the notro/fbtft framebuffer driver, so that needs to be disabled if active. That is, if your /boot/config.txt file has lines that look something like dtoverlay=pitft28r, ..., dtoverlay=waveshare32b, ... or dtoverlay=flexfb, ..., those should be removed.
This program neither utilizes the default SPI driver, so a line such as dtparam=spi=on in /boot/config.txt should also be removed so that it will not cause conflicts.
When using one of the displays that stack on top of the Pi that are already recognized by fbcp-ili9341, you don"t need to specify the GPIO pin assignments, but fbcp-ili9341 code already has those. Pass one of the following CMake directives for the hats:
-DFREEPLAYTECH_WAVESHARE32B=ON: If you are running on the Freeplay CM3 or Zero device, pass this flag. (this is not a hat, but still a preconfigured pin assignment)
-DPIRATE_AUDIO_ST7789_HAT=ON: If specified, targets a Pirate Audio 240x240, 1.3inch IPS LCD display HAT for Raspberry Pi with ST7789 display controller
-DKEDEI_V63_MPI3501=ON: If specified, targets a KeDei 3.5 inch SPI TFTLCD 480*320 16bit/18bit version 6.3 2018/4/9 display with MPI3501 display controller.
If you connected wires directly on the Pi instead of using a Hat from the above list, you will need to use the configuration directives below. In addition to specifying the display, you will also need to tell fbcp-ili9341 which GPIO pins you wired the connections to. To configure the display controller, pass one of:
-DGPIO_TFT_DATA_CONTROL=number: Specifies/overrides which GPIO pin to use for the Data/Control (DC) line on the 4-wire SPI communication. This pin number is specified in BCM pin numbers. If you have a 3-wire SPI display that does not have a Data/Control line, set this value to -1, i.e. -DGPIO_TFT_DATA_CONTROL=-1 to tell fbcp-ili9341 to target 3-wire ("9-bit") SPI communication.
-DGPIO_TFT_RESET_PIN=number: Specifies/overrides which GPIO pin to use for the display Reset line. This pin number is specified in BCM pin numbers. If omitted, it is assumed that the display does not have a Reset pin, and is always on.
-DGPIO_TFT_BACKLIGHT=number: Specifies/overrides which GPIO pin to use for the display backlight line. This pin number is specified in BCM pin numbers. If omitted, it is assumed that the display does not have a GPIO-controlled backlight pin, and is always on. If setting this, also see the #define BACKLIGHT_CONTROL option in config.h.
fbcp-ili9341 always uses the hardware SPI0 port, so the MISO, MOSI, CLK and CE0 pins are always the same and cannot be changed. The MISO pin is actually not used (at the moment at least), so you can just skip connecting that one. If your display is a rogue one that ignores the chip enable line, you can omit connecting that as well, or might also be able to get away by connecting that to ground if you are hard pressed to simplify wiring (depending on the display).
-DSPI_BUS_CLOCK_DIVISOR=even_number: Sets the clock divisor number which along with the Pi core_freq= option in /boot/config.txt specifies the overall speed that the display SPI communication bus is driven at. SPI_frequency = core_freq/divisor. SPI_BUS_CLOCK_DIVISOR must be an even number. Default Pi 3B and Zero W core_freq is 400MHz, and generally a value -DSPI_BUS_CLOCK_DIVISOR=6 seems to be the best that a ILI9341 display can do. Try a larger value if the display shows corrupt output, or a smaller value to get higher bandwidth. See ili9341.h and waveshare35b.h for data points on tuning the maximum SPI performance. Safe initial value could be something like -DSPI_BUS_CLOCK_DIVISOR=30.
There are a couple of options to explicitly say which Pi board you want to target. These should be autodetected for you and generally are not needed, but e.g. if you are cross compiling for another Pi board from another system, or want to be explicit, you can try:
-DSINGLE_CORE_BOARD=ON: Pass this option if you are running on a Pi that has only one hardware thread (Pi Model A, Pi Model B, Compute Module 1, Pi Zero/Zero W). If not present, autodetected.
-DARMV8A=ON: Pass this option to specifically optimize for ARMv8-A instruction set (Pi 2B >= rev. 1.2, 3B, 3B+, CM3, CM3 lite, 4B, CM4, Pi400). If not present, autodetected.
-DBACKLIGHT_CONTROL=ON: If set, enables fbcp-ili9341 to control the display backlight in the given backlight pin. The display will go to sleep after a period of inactivity on the screen. If not, backlight is not touched.
-DDISPLAY_CROPPED_INSTEAD_OF_SCALING=ON: If set, and source video frame is larger than the SPI display video resolution, the source video is presented on the SPI display by cropping out parts of it in all directions, instead of scaling to fit.
-DDISPLAY_BREAK_ASPECT_RATIO_WHEN_SCALING=ON: When scaling source vi



 Ms.Josey
Ms.Josey 
 Ms.Josey
Ms.Josey