
tft lcd raspberry pi gpio pins price

There are two ways of connecting a display to a Raspberry Pi - via the HDMI port or the GPIO pins/DSI cable. Depending on your project you may want to go one way or the other, to free up those valuable GPIO pins or have something compact and cable-free.
This section contains all of our GPIO and DSI connected Raspberry Pi displays. Almost every display here is connected via your Raspberry Pi GPIO pins, which usually means they"re more compact and remove the need to use an HDMI cable - which can keep your project nice and tidy when fitting into an enclosure or similar.
GPIO-connected Raspberry Pi displays aren"t always small either, we have GPIO/DSI screens ranging from ~2" up to ~7", giving you more choice and flexibility for your project.

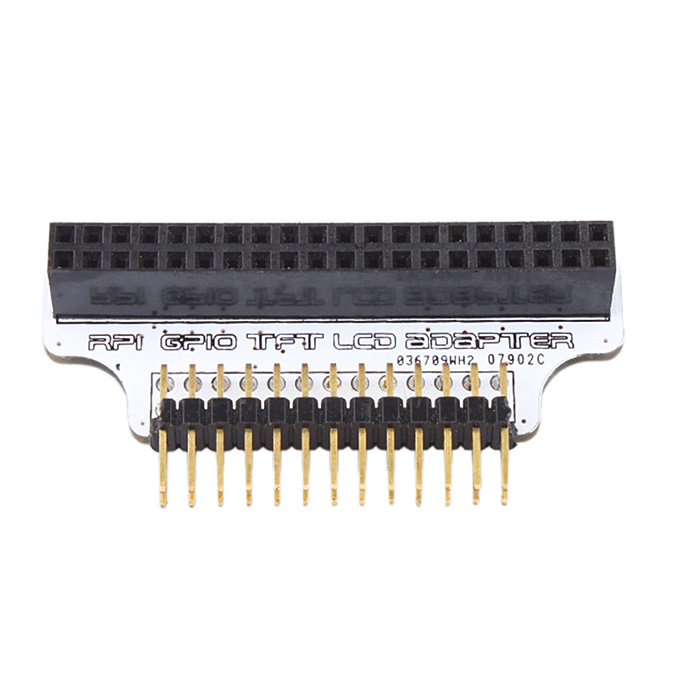
This is a portable 3.5" resistance touchscreen hat with 480 x 320 resolution designed for Raspberry Pi b+, Raspberry Pi 2 and Raspberry Pi 3. The DFRobot Gravity connector makes it easier to connect sensors and modules or even to debug Raspberry Pi via serial port. All the Raspberry Pi GPIO are accessible through pin headers at the side of the screen.
Looking for a small screen that is the same size as your Raspberry Pi? This 3.5" resistance touch screen with 480 x 320 resolution will certainly meet your needs. If further combined with a wireless keyboard, It will act as a fully functional computer that fits right in your pocket. Use it to run the Pi"s terminal, to play games, or to browse the web.
This item is more than just a screen, it is also a development friendly platform. It is seamlessly compatible withDFRobot Gravity series modules making it easy to connect or even to debug your Pi via the serial port! All the pins of Pi are left unoccupied, giving you more room to connect jumper wires.
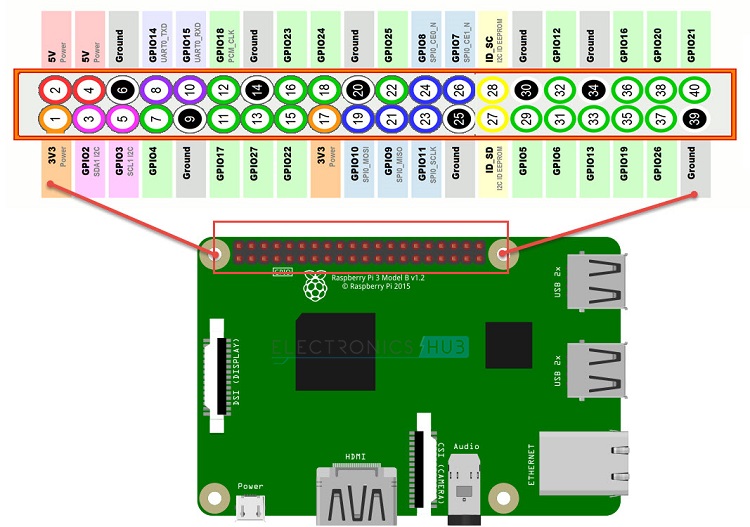
This Touchscreen is well designed for the Raspberry Pi 3, 2 or Model B+ (with 40 GPIO Pins). Please note that it is not directly compatible with the old 26 pin GPIO Raspberry Pi.

A resolution to the test screens that occur during reboot has been released as an app note. The app note can be found in the documents section of the product page here: https://www.crystalfontz.com/product/cfam800480b0050tc-800x480-raspberry-pi-dsi-tft-lcd
*For applications where the controller will be shut down or reset, an additional connection to the reset (RST) pin on the J3 header is required, and must be toggled during boot-up.
**Some versions of Raspbian the creators have inverted the display which can cause the touch screen to not track the same with the image. To fix this, add lcd_rotate = 2 to the config.txt

Before having this screen, running the script below and connecting the momentary button to pins 21 and ground allowed me to switch the pi after holding the button pressed for 6 seconds.
It is using RGB666 so GPIO22, GPIO23, GPIO24, GPIO25, GPIO26, GPIO27 should be unused. The schematic for the RGB LCD HAT confirms that they"re not connected. You should be able to reuse one of those GPIOs but you"ll need to solder wires to the top of the header on the HAT as the unused GPIOs aren"t broken out to a pin or pad.
Yes but you"ll need to test it. Extending the LCD interface pins isn"t a great idea but it is probably okay as the Adafruit DPI TFT Kippah setup has a much longer ribbon cable anyway. Another potential issue is that it isn"t very compact as over half the RGB LCD HAT will hang over the edge.
Yes but you"ll need to test it. Extending the LCD interface pins isn"t a great idea but it is probably okay as the Adafruit DPI TFT Kippah setup has a much longer ribbon cable anyway. Another potential issue is that it isn"t very compact as over half the RGB LCD HAT will hang over the edge.
Hi again, I finally got the GPIO extension board. I am suing the GPIO26 and the GROUND next to it. If I press and hold it the screen becomes white... Shall I actually use a specific ground pin to make it work?
The simplest one (assuming the fan draws less than the max current for the board / port) is to break these out from a USB port. USB 2 is the simplest as the power / ground lines are at the outside of the four pins.
I have seen one other way that"s too fiddly for me. The black plastic of the GPIOs was cut back around the 5V pin, a wire then wrapped around this and shrink wrapped in place and a HAT put on the pins above this wire. The +5 is too close to the ground for me to be comfortable with this but YMMV.
If your case is large enough then GPIO expanders are available. I use [this one] on a Zero W (with an Inky-phat on top) but others are available2 - these extend the pins out to the side of the Pi board and simplify connection.
Note: On the Pi, all ground and 5v rails are common so any pin (with the correct voltage marked) can be used. The 5v pins on the GPIO come direct from the power supply connection on the USB power socket.

In these videos, the SPI (GPIO) bus is referred to being the bottleneck. SPI based displays update over a serial data bus, transmitting one bit per clock cycle on the bus. A 320x240x16bpp display hence requires a SPI bus clock rate of 73.728MHz to achieve a full 60fps refresh frequency. Not many SPI LCD controllers can communicate this fast in practice, but are constrained to e.g. a 16-50MHz SPI bus clock speed, capping the maximum update rate significantly. Can we do anything about this?
The fbcp-ili9341 project started out as a display driver for the Adafruit 2.8" 320x240 TFT w/ Touch screen for Raspberry Pi display that utilizes the ILI9341 controller. On that display, fbcp-ili9341 can achieve a 60fps update rate, depending on the content that is being displayed. Check out these videos for examples of the driver in action:
Given that the SPI bus can be so constrained on bandwidth, how come fbcp-ili9341 seems to be able to update at up to 60fps? The way this is achieved is by what could be called adaptive display stream updates. Instead of uploading each pixel at each display refresh cycle, only the actually changed pixels on screen are submitted to the display. This is doable because the ILI9341 controller, as many other popular controllers, have communication interface functions that allow specifying partial screen updates, down to subrectangles or even individual pixel levels. This allows beating the bandwidth limit: for example in Quake, even though it is a fast pacing game, on average only about 46% of all pixels on screen change each rendered frame. Some parts, such as the UI stay practically constant across multiple frames.
A hybrid of both Polled Mode SPI and DMA based transfers are utilized. Long sequential transfer bursts are performed using DMA, and when DMA would have too much latency, Polled Mode SPI is applied instead.
Undocumented BCM2835 features are used to squeeze out maximum bandwidth: SPI CDIV is driven at even numbers (and not just powers of two), and the SPI DLEN register is forced in non-DMA mode to avoid an idle 9th clock cycle for each transferred byte.
Good old interlacing is added into the mix: if the amount of pixels that needs updating is detected to be too much that the SPI bus cannot handle it, the driver adaptively resorts to doing an interlaced update, uploading even and odd scanlines at subsequent frames. Once the number of pending pixels to write returns to manageable amounts, progressive updating is resumed. This effectively doubles the maximum display update rate. (If you do not like the visual appearance that interlacing causes, it is easy to disable this by uncommenting the line #define NO_INTERLACING in file config.h)
A number of other micro-optimization techniques are used, such as batch updating rectangular spans of pixels, merging disjoint-but-close spans of pixels on the same scanline, and latching Column and Page End Addresses to bottom-right corner of the display to be able to cut CASET and PASET messages in mid-communication.
The result is that the SPI bus can be kept close to 100% saturation, ~94-97% usual, to maximize the utilization rate of the bus, while only transmitting practically the minimum number of bytes needed to describe each new frame.
although not all boards are actively tested on, so ymmv especially on older boards. (Bug fixes welcome, use https://elinux.org/RPi_HardwareHistory to identify which board you are running on)
This driver does not utilize the notro/fbtft framebuffer driver, so that needs to be disabled if active. That is, if your /boot/config.txt file has lines that look something like dtoverlay=pitft28r, ..., dtoverlay=waveshare32b, ... or dtoverlay=flexfb, ..., those should be removed.
This program neither utilizes the default SPI driver, so a line such as dtparam=spi=on in /boot/config.txt should also be removed so that it will not cause conflicts.
When using one of the displays that stack on top of the Pi that are already recognized by fbcp-ili9341, you don"t need to specify the GPIO pin assignments, but fbcp-ili9341 code already has those. Pass one of the following CMake directives for the hats:
-DFREEPLAYTECH_WAVESHARE32B=ON: If you are running on the Freeplay CM3 or Zero device, pass this flag. (this is not a hat, but still a preconfigured pin assignment)
-DPIRATE_AUDIO_ST7789_HAT=ON: If specified, targets a Pirate Audio 240x240, 1.3inch IPS LCD display HAT for Raspberry Pi with ST7789 display controller
-DKEDEI_V63_MPI3501=ON: If specified, targets a KeDei 3.5 inch SPI TFTLCD 480*320 16bit/18bit version 6.3 2018/4/9 display with MPI3501 display controller.
If you connected wires directly on the Pi instead of using a Hat from the above list, you will need to use the configuration directives below. In addition to specifying the display, you will also need to tell fbcp-ili9341 which GPIO pins you wired the connections to. To configure the display controller, pass one of:
-DGPIO_TFT_DATA_CONTROL=number: Specifies/overrides which GPIO pin to use for the Data/Control (DC) line on the 4-wire SPI communication. This pin number is specified in BCM pin numbers. If you have a 3-wire SPI display that does not have a Data/Control line, set this value to -1, i.e. -DGPIO_TFT_DATA_CONTROL=-1 to tell fbcp-ili9341 to target 3-wire ("9-bit") SPI communication.
-DGPIO_TFT_RESET_PIN=number: Specifies/overrides which GPIO pin to use for the display Reset line. This pin number is specified in BCM pin numbers. If omitted, it is assumed that the display does not have a Reset pin, and is always on.
-DGPIO_TFT_BACKLIGHT=number: Specifies/overrides which GPIO pin to use for the display backlight line. This pin number is specified in BCM pin numbers. If omitted, it is assumed that the display does not have a GPIO-controlled backlight pin, and is always on. If setting this, also see the #define BACKLIGHT_CONTROL option in config.h.
fbcp-ili9341 always uses the hardware SPI0 port, so the MISO, MOSI, CLK and CE0 pins are always the same and cannot be changed. The MISO pin is actually not used (at the moment at least), so you can just skip connecting that one. If your display is a rogue one that ignores the chip enable line, you can omit connecting that as well, or might also be able to get away by connecting that to ground if you are hard pressed to simplify wiring (depending on the display).
-DSPI_BUS_CLOCK_DIVISOR=even_number: Sets the clock divisor number which along with the Pi core_freq= option in /boot/config.txt specifies the overall speed that the display SPI communication bus is driven at. SPI_frequency = core_freq/divisor. SPI_BUS_CLOCK_DIVISOR must be an even number. Default Pi 3B and Zero W core_freq is 400MHz, and generally a value -DSPI_BUS_CLOCK_DIVISOR=6 seems to be the best that a ILI9341 display can do. Try a larger value if the display shows corrupt output, or a smaller value to get higher bandwidth. See ili9341.h and waveshare35b.h for data points on tuning the maximum SPI performance. Safe initial value could be something like -DSPI_BUS_CLOCK_DIVISOR=30.
There are a couple of options to explicitly say which Pi board you want to target. These should be autodetected for you and generally are not needed, but e.g. if you are cross compiling for another Pi board from another system, or want to be explicit, you can try:
-DSINGLE_CORE_BOARD=ON: Pass this option if you are running on a Pi that has only one hardware thread (Pi Model A, Pi Model B, Compute Module 1, Pi Zero/Zero W). If not present, autodetected.
-DARMV8A=ON: Pass this option to specifically optimize for ARMv8-A instruction set (Pi 2B >= rev. 1.2, 3B, 3B+, CM3, CM3 lite, 4B, CM4, Pi400). If not present, autodetected.
-DBACKLIGHT_CONTROL=ON: If set, enables fbcp-ili9341 to control the display backlight in the given backlight pin. The display will go to sleep after a period of inactivity on the screen. If not, backlight is not touched.
-DDISPLAY_CROPPED_INSTEAD_OF_SCALING=ON: If set, and source video frame is larger than the SPI display video resolution, the source video is presented on the SPI display by cropping out parts of it in all directions, instead of scaling to fit.
-DDISPLAY_BREAK_ASPECT_RATIO_WHEN_SCALING=ON: When scaling source video to SPI display, scaling is performed by default following aspect ratio, adding letterboxes/pillarboxes as needed. If this is set, the stretching is performed breaking aspect ratio.
-DDISPLAY_SWAP_BGR=ON: If this option is passed, red and blue color channels are reversed (RGB<->BGR) swap. Some displays have an opposite color panel subpixel layout that the display controller does not automatically account for, so define this if blue and red are mixed up.
-DDISPLAY_INVERT_COLORS=ON: If this option is passed, pixel color value interpretation is reversed (white=0, black=31/63). Default: black=0, white=31/63. Pass this option if the display image looks like a color negative of the actual colors.
-DLOW_BATTERY_PIN=
Here is a full example of what to type to build and run, if you have the Adafruit 2.8" 320x240 TFT w/ Touch screen for Raspberry Pi with ILI9341 controller:
If the above does not work, try specifying -DSPI_BUS_CLOCK_DIVISOR=8 or =10 to make the display run a little slower, or try with -DUSE_DMA_TRANSFERS=OFF to troubleshoot if DMA might be the issue. If you are using another display controller than ILI9341, using a much higher value, like 30 or 40 may be needed. When changing CMake options, you can reissue the CMake directive line without having to reclone or recreate the build directory. However you may need to manually delete file CMakeCache.txt between changing options to avoid CMake remembering old settings.
If the user name of your Raspberry Pi installation is something else than the default pi, change the directory accordingly to point to the user"s home directory. (Use pwd to find out the current directory in terminal)
If the size of the default HDMI output /dev/fb0 framebuffer differs from the resolution of the display, the source video size will by default be rescaled to fit to the size of the SPI display. fbcp-ili9341 will manage setting up this rescaling if needed, and it will be done by the GPU, so performance should not be impacted too much. However if the resolutions do not match, small text will probably appear illegible. The resizing will be done in aspect ratio preserving manner, so if the aspect ratios do not match, either horizontal or vertical black borders will appear on the display. If you do not use the HDMI output at all, it is probably best to configure the HDMI output to match the SPI display size so that rescaling will not be needed. This can be done by setting the following lines in /boot/config.txt:
These lines hint native applications about the default display mode, and let them render to the native resolution of the TFT display. This can however prevent the use of the HDMI connector, if the HDMI connected display does not support such a small resolution. As a compromise, if both HDMI and SPI displays want to be used at the same time, some other compatible resolution such as 640x480 can be used. See Raspberry Pi HDMI documentation for the available options to do this.
The refresh speed of the display is dictated by the clock speed of the SPI bus that the display is connected to. Due to the way the BCM2835 chip on Raspberry Pi works, there does not exist a simple speed=xxx Mhz option that could be set to define the bus speed. Instead, the SPI bus speed is derived from two separate parameters: the core frequency of the BCM2835 SoC in general (core_freq in /boot/config.txt), and the SPI peripheral CDIV (Clock DIVider) setting. Together, the resulting SPI bus speed is then calculated with the formula SPI_speed=core_freq/CDIV.
Adjust the CDIV value by passing the directive -DSPI_BUS_CLOCK_DIVISOR=number in CMake command line. Possible values are even numbers 2, 4, 6, 8, .... Note that since CDIV appears in the denominator in the formula for SPI_speed, smaller values result in higher bus speeds, whereas higher values make the display go slower. Initially when you don"t know how fast your display can run, try starting with a safe high setting, such as -DSPI_BUS_CLOCK_DIVISOR=30, and work your way to smaller numbers to find the maximum speed the display can cope with. See the table at the end of the README for specific observed maximum bus speeds for different displays.
Ensure turbo speed. This is critical for good frame rates. On the Raspberry Pi 3 Model B, the BCM2835 core runs by default at 400MHz (resulting in 400/CDIV MHz SPI speed) if there is enough power provided to the Pi, and if the CPU temperature does not exceed thermal limits. If the CPU is idle, or voltage is low, the BCM2835 core will instead revert to non-turbo 250MHz state, resulting in 250/CDIV MHz SPI speed. This effect of turbo speed on performance is significant, since 400MHz vs non-turbo 250MHz comes out to +60% of more bandwidth. Getting 60fps in Quake, Sonic or Tyrian often requires this turbo frequency, but e.g. NES and C64 emulated games can often reach 60fps even with the stock 250MHz. If for some reason under-voltage protection is kicking in even when enough power should be fed, you can force-enable turbo when low voltage is present by setting the value avoid_warnings=2 in the file /boot/config.txt.
Perhaps a bit counterintuitively, underclock the core. Setting a smaller core frequency than the default turbo 400MHz can enable using a smaller clock divider to get a higher resulting SPI bus speed. For example, if with default core_freq=400 SPI CDIV=8 works (resulting in SPI bus speed 400MHz/8=50MHz), but CDIV=6 does not (400MHz/6=66.67MHz was too much), you can try lowering core_freq=360 and set CDIV=6 to get an effective SPI bus speed of 360MHz/6=60MHz, a middle ground between the two that might perhaps work. Balancing core_freq= and CDIV options allows one to find the maximum SPI bus speed up to the last few kHz that the display controller can tolerate. One can also try the opposite direction and overclock, but that does then of course have all the issues that come along when overclocking. Underclocking does have the drawback that it makes the Pi run slower overall, so this is certainly a tradeoff.
On the other hand, it is desirable to control how much CPU time fbcp-ili9341 is allowed to use. The default build settings are tuned to maximize the display refresh rate at the expense of power consumption on Pi 3B. On Pi Zero, the opposite is done, i.e. by default the driver optimizes for battery saving instead of maximal display update speed. The following options can be controlled to balance between these two:
The main option to control CPU usage vs performance aspect is the option #define ALL_TASKS_SHOULD_DMA in config.h. Enabling this option will greatly reduce CPU usage. If this option is disabled, SPI bus utilization is maximized but CPU usage can be up to 80%-120%. When this option is enabled, CPU usage is generally up to around 15%-30%. Maximal CPU usage occurs when watching a video, or playing a fast moving game. If nothing is changing on the screen, CPU consumption of the driver should go down very close to 0-5%. By default #define ALL_TASKS_SHOULD_DMA is enabled for Pi Zero, but disabled for Pi 3B.
The CMake option -DUSE_DMA_TRANSFERS=ON should always be enabled for good low CPU usage. If DMA transfers are disabled, the driver will run in Polled SPI mode, which generally utilizes a full dedicated single core of CPU time. If DMA transfers are causing issues, try adjusting the DMA send and receive channels to use for SPI communication with -DDMA_TX_CHANNEL=
Enabling #define USE_GPU_VSYNC reduces CPU consumption, but because of raspberrypi/userland#440 can cause stuttering. Disabling #defined USE_GPU_VSYNC produces less stuttering, but because of raspberrypi/userland#440, increases CPU power consumption.
The option #define SELF_SYNCHRONIZE_TO_GPU_VSYNC_PRODUCED_NEW_FRAMES can be used in conjunction with #define USE_GPU_VSYNC to try to find a middle ground between raspberrypi/userland#440 issues - moderate to little stuttering while not trying to consume too much CPU. Try experimenting with enabling or disabling this setting.
If your SPI display bus is able to run really fast in comparison to the size of the display and the amount of content changing on the screen, you can try enabling #define UPDATE_FRAMES_IN_SINGLE_RECTANGULAR_DIFF option in config.h to reduce CPU usage at the expense of increasing the number of bytes sent over the bus. This has been observed to have a big effect on Pi Zero, so is worth checking out especially there.
If the SPI display bus is able to run really really really fast (or you don"t care about frame rate, but just about low CPU usage), you can try enabling #define UPDATE_FRAMES_WITHOUT_DIFFING option in config.h to forgo the adaptive delta diffing option altogether. This will revert to naive full frame updates for absolutely minimum overall CPU usage.
A pleasing aspect of fbcp-ili9341 is that it introduces very little latency overhead: on a 119Hz refreshing ILI9341 display, fbcp-ili9341 gets pixels as response from GPIO input to screen in well less than 16.66 msecs time. I only have a 120fps recording camera, so can"t easily measure delays shorter than that, but rough statistical estimate of slow motion video footage suggests this delay could be as low as 2-3 msecs, dominated by the ~8.4msecs panel refresh rate of the ILI9341.
This does not mean that overall input to display latency in games would be so immediate. Briefly testing a NES emulated game in Retropie suggests a total latency of about 60-80 msecs. This latency is caused by the NES game emulator overhead and extra latency added by Linux, DispmanX and GPU rendering, and GPU framebuffer snapshotting. (If you ran fbcp-ili9341 as a static library bypassing DispmanX and the GPU stack, directly linking your GPIO input and application logic into fbcp-ili9341, you would be able to get down to this few msecs of overall latency, like shown in the above GPIO input video)
Interestingly, fbcp-ili9341 is about ~33msecs faster than a cheap 3.5" KeDei HDMI display. I do not know if this is a result of the KeDei HDMI display specifically introducing extra latency, or if all HDMI displays connected to the Pi would have similar latency overhead. An interesting question is also how SPI would compare with DPI connected displays on the Pi.
Unfortunately a limitation of SPI connected displays is that the VSYNC line signal is not available on the display controllers when they are running in SPI mode, so it is not possible to do vsync locked updates even if the SPI bus bandwidth on the display was fast enough. For example, the 4 ILI9341 displays I have can all be run faster than 75MHz so SPI bus bandwidth-wise all of them would be able to update a full frame in less than a vsync interval, but it is not possible to synchronize the updates to vsync since the display controllers do not report it. (If you do know of a display that does actually expose a vsync clock signal even in SPI mode, you can try implementing support to locking on to it)
You can however choose between two distinct types of tearing artifacts: straight line tearing and diagonal tearing. Whichever looks better is a bit subjective, which is why both options exist. I prefer the straight line tearing artifact, it seems to be less intrusive than the diagonal tearing one. To toggle this, edit the option #define DISPLAY_FLIP_ORIENTATION_IN_SOFTWARE in config.h. When this option is enabled, fbcp-ili9341 produces straight line tearing, and consumes a tiny few % more CPU power. By default Pi 3B builds with straight line tearing, and Pi Zero with the faster diagonal tearing. Check out the video Latency and tearing test #2: GPIO input to display latency in fbcp-ili9341 and tearing modes to see in slow motion videos how these two tearing modes look like.
To get tearing free updates, you should use a DPI display, or a good quality HDMI display. Beware that cheap small 3.5" HDMI displays such as KeDei do also tear - that is, even if they are controlled via HDMI, they don"t actually seem to implement VSYNC timed internal operation.
Having no vsync is not all bad though, since with the lack of vsync, SPI displays have the opportunity to obtain smoother animation on content that is not updating at 60Hz. It is possible that content on the SPI display will stutter even less than what DPI or HDMI displays on the Pi can currently provide (although I have not been able to test this in detail, except for the KeDei case above).
The main option that affects smoothness of display updates is the #define USE_GPU_VSYNC line in config.h. If this is enabled, then the internal Pi GPU HDMI vsync clock is used to drive frames onto the display. The Pi GPU clock runs at a fixed rate that is independent of the content. This rate can be discovered by running tvservice -s on the Pi console, and is usually 59Hz or 60Hz. If your application renders at this rate, animation will look smooth, but if not, there will be stuttering. For example playing a PAL NES game that updates at 50Hz with HDMI clock set at 60Hz will cause bad microstuttering in video output if #define USE_GPU_VSYNC is enabled.
If USE_GPU_VSYNC is disabled, then a busy spinning GPU frame snapshotting thread is used to drive the updates. This will produce smoother animation in content that does not maintain a fixed 60Hz rate. Especially in OpenTyrian, a game that renders at a fixed 36fps and has slowly scrolling scenery, the stuttering caused by USE_GPU_VSYNC is particularly visible. Running on Pi 3B without USE_GPU_VSYNC enabled produces visually smoother looking scrolling on an Adafruit 2.8" ILI9341 PiTFT set to update at 119Hz, compared to enabling USE_GPU_VSYNC on the same setup. Without USE_GPU_VSYNC, the dedicated frame polling loop thread "finds" the 36Hz update rate of the game, and then pushes pixels to the display at this exact rate. This works nicely since SPI displays disregard vsync - the result is that frames are pushed out to the SPI display immediately as they become available, instead of pulling them at a fixed 60Hz rate like HDMI does.
A drawback is that this kind of polling consumes more CPU time than the vsync option. The extra overhead is around +34% of CPU usage compared to the vsync method. It also requires using a background thread, and because of this, it is not feasible to be used on a single core Pi Zero. If this polling was unnecessary, this mode would also work on a Pi Zero, and without the added +34% CPU overhead on Pi 3B. See the Known Issues section below for more details.
There are two other main options that affect frame delivery timings, #define SELF_SYNCHRONIZE_TO_GPU_VSYNC_PRODUCED_NEW_FRAMES and #define SAVE_BATTERY_BY_PREDICTING_FRAME_ARRIVAL_TIMES. Check out the video fbcp-ili9341 frame delivery smoothness test on Pi 3B and Adafruit ILI9341 at 119Hz for a detailed side by side comparison of these different modes. The conclusions drawn from the four tested scenarios in the video are:
This mode uses the GPU vsync signal, but also aims to find and synchronize to the edge trigger when content is producing frames. This is the default build mode on Pi Zero.
The codebase captures screen framebuffers by snapshotting via the VideoCore vc_dispmanx_snapshot() API, and the obtained pixels are then routed on to the SPI-based display. This kind of polling is performed, since there does not exist an event-based mechanism to get new frames from the GPU as they are produced. The result is inefficient and can easily cause stuttering, since different applications produce frames at different paces. Ideally the code would ask the VideoCore API to receive finished frames in callback notifications immediately after they are rendered, but this kind of functionality does not exist in the current GPU driver stack. In the absence of such event delivery mechanism, the code has to resort to polling snapshots of the display framebuffer using carefully timed heuristics to balance between keeping latency and stuttering low, while not causing excessive power consumption. These heuristics keep continuously guessing the update rate of the animation on screen, and they have been tuned to ensure that CPU usage goes down to 0% when there is no detected activity on screen, but it is certainly not perfect. This GPU limitation is discussed at raspberrypi/userland#440. If you"d like to see fbcp-ili9341 operation reduce latency, stuttering and power consumption, please throw a (kind!) comment or a thumbs up emoji in that bug thread to share that you care about this, and perhaps Raspberry Pi engineers might pick the improvement up on the development roadmap. If this issue is resolved, all of the #define USE_GPU_VSYNC, #define SAVE_BATTERY_BY_PREDICTING_FRAME_ARRIVAL_TIMES and #define SELF_SYNCHRONIZE_TO_GPU_VSYNC_PRODUCED_NEW_FRAMES hacks from the previous section could be deleted from the driver, hopefully leading to a best of all worlds scenario without drawbacks.
Currently if one resizes the video frame size at runtime, this causes DispmanX API to go sideways. See raspberrypi/userland#461 for more information. Best workaround is to set the desired screen resolution in /boot/config.txt and configure all applications to never change that at runtime.
The speed of the SPI bus is linked to the BCM2835 core frequency. This frequency is at 250MHz by default (on e.g. Pi Zero, 3B and 3B+), and under CPU load, the core turbos up to 400MHz. This turboing directly scales up the SPI bus speed by 400/250=+60% as well. Therefore when choosing the SPI CDIV value to use, one has to pick one that works for both idle and turbo clock speeds. Conversely, the BCM core reverts to non-turbo speed when there is only light CPU load active, and this slows down the display, so if an application is graphically intensive but light on CPU, the SPI display bus does not get a chance to run at maximum speeds. A way to work around this is to force the BCM core to always stay in its turbo state with force_turbo=1 option in /boot/config.txt, but this has an unfortunate effect of causing the ARM CPU to always run in turbo speed as well, consuming excessive amounts of power. At the time of writing, there does not yet exist a good solution to have both power saving and good performance. This limitation is being discussed in more detail at raspberrypi/firmware#992.
By default fbcp-ili9341 builds with a statistics overlay enabled. See the video fbcp-ili9341 ported to ILI9486 WaveShare 3.5" (B) SpotPear 320x480 SPI display to find details on what each field means. Build with CMake option -DSTATISTICS=0 to disable displaying the statistics. You can also try building with CMake option -DSTATISTICS=2 to show a more detailed frame delivery timings histogram view, see screenshot and video above.
The fbcp part in the name means framebuffer copy; specifically for the ILI9341 controller. fbcp-ili9341 is not actually a framebuffer copying driver, it does not create a secondary framebuffer that it would copy bytes across to from the primary framebuffer. It is also no longer a driver only for the ILI9341 controller. A more appropriate name might be userland-raspi-spi-display-driver or something like that, but the original name stuck.
Yes, it does, although not quite as well as on Pi 3B. If you"d like it to run better on a Pi Zero, leave a thumbs up at raspberrypi/userland#440 - hard problems are difficult to justify prioritizing unless it is known that many people care about them.
Edit the file config.h and comment out the line #define DISPLAY_OUTPUT_LANDSCAPE. This will make the display output in portrait mode, effectively rotating it by 90 degrees. Note that this only affects the pixel memory reading mode of the display. It is not possible to change the panel scan order to run between landscape and portrait, the SPI displays typically always scan in portrait mode. The result is that it will change the panel vsync tearing mode from "straight line tearing" over to "diagonal tearing" (see the section About Tearing above).
Enable the option #define DISPLAY_ROTATE_180_DEGREES in config.h. This should rotate the SPI display to show up the other way around, while keeping the HDMI connected display orientation unchanged. Another option is to utilize a /boot/config.txt option display_rotate=2, which rotates both the SPI output and the HDMI output.
Note that the setting DISPLAY_ROTATE_180_DEGREES only affects the pixel memory reading mode of the display. It is not possible to flip the panel scan to run inverted by 180 degrees. This means that adjusting these settings will also have effects of changing the visual appearance of the vsync tearing artifact. If you have the ability to mount the display 180 degrees around in your project, it is recommended to do that instead of using the DISPLAY_ROTATE_180_DEGREES option.
Edit the file config.h in a text editor (a command line one such as pico, vim, nano, or SSH map the drive to your host), and find the appropriate line in the file. Add comment lines // in front of that text to disable the option, or remove the // characters to enable it.
I don"t know, I don"t currently have any to test. Perhaps the code does need some model specific configuration, or perhaps it might work out of the box. I only have Pi 3B, Pi 3B+, Pi Zero W and a Pi 3 Compute Module based systems to experiment on. Pi 2 B has been reported to work by users (#17).
If the display controller is one of the currently tested ones (see the list above), and it is wired up to run using 4-line SPI, then it should work. Pay attention to configure the Data/Control GPIO pin number correctly, and also specify the Reset GPIO pin number if the device has one.
If fbcp-ili9341 does not support your display controller, you will have to write support for it. fbcp-ili9341 does not have a "generic SPI TFT driver routine" that might work across multiple devices, but needs specific code for each. If you have the spec sheet available, you can ask for advice, but please do not request to add support to a display controller "blind", that is not possible.
Perhaps. This is a more recent experimental feature that may not be as stable, and there are some limitations, but 3-wire ("9-bit") SPI display support is now available. If you have a 3-wire SPI display, i.e. one that does not have a Data/Control (DC) GPIO pin to connect, configure it via CMake with directive -DGPIO_TFT_DATA_CONTROL=-1 to tell fbcp-ili9341 that it should be driving the display with 3-wire protocol.
The performance option OFFLOAD_PIXEL_COPY_TO_DMA_CPP is currently not supported. As a result, 3-wire displays may not work that well on single core Pis like Pi Zero.
This has only been tested on my Adafruit SSD1351 128x96 RGB OLED display, which can be soldered to operate in 3-wire SPI mode, so testing has not been particularly extensive.
I have done close to everything possible to my displays - cut power in middle of operation, sent random data and command bytes, set their operating voltage commands and clock timings to arbitrary high and low values, tested unspecified and reserved command fields, and driven the displays dozens of MHz faster than they managed to keep up with, and I have not yet done permanent damage to any of my displays or Pis.
Yes, fbcp-ili9341 shows the output of the HDMI display on the SPI screen, and both can be attached at the same time. A HDMI display does not have to be connected however, although fbcp-ili9341 operation will still be affected by whatever HDMI display mode is configured. Check out tvservice -s on the command line to check what the current DispmanX HDMI output mode is.
At the moment fbcp-ili9341 has been developed to only display the contents of the main DispmanX GPU framebuffer over to the SPI display. That is, the SPI display will show the same picture as the HDMI output does. There is no technical restriction that requires this though, so if you know C/C++ well, it should be a manageable project to turn fbcp-ili9341 to operate as an offscreen display library to show a completely separate (non-GPU-accelerated) image than what the main HDMI display outputs. For example you could have two different outputs, e.g. a HUD overlay, a dashboard for network statistics, weather, temps, etc. showing on the SPI while having the main Raspberry Pi desktop on the HDMI.
shut down and physically power off the Pi and the display in between multiple tests. Driving a display with a wrong initialization routine may put it in a bad state that needs a physical power off for it to reset,
if there is a reset pin on the display, make sure to pass it in CMake line. Or alternatively, try driving fbcp-ili9341 without specifying the reset pin,
make sure the display is configured to run 4-wire SPI mode, and not in parallel mode or 3-wire SPI mode. You may need to solder or desolder some connections or set a jumper to configure the specific driving mode. Support for 3-wire SPI displays does exist, but it is more limited and a bit experimental.
This suggests that the power line or the backlight line might not be properly connected. Or if the backlight connects to a GPIO pin on the Pi (and not a voltage pin), then it may be that the pin is not in correct state for the backlight to turn on. Most of the LCD TFT displays I have immediately light up their backlight when they receive power. The Tontec one has a backlight GPIO pin that boots up high but must be pulled low to activate the backlight. OLED displays on the other hand seem to stay all black even after they do get power, while waiting for their initialization to be performed, so for OLEDs it may be normal for nothing to show up on the screen immediately after boot.
If the backlight connects to a GPIO pin, you may need to define -DGPIO_TFT_BACKLIGHT=
fbcp-ili9341 runs a clear screen command at low speed as first thing after init, so if that goes through, it is a good sign. Try increasing -DSPI_BUS_CLOCK_DIVISOR= CMake option to a higher number to see if the display driving rate was too fast. Or try disabling DMA with -DUSE_DMA_TRANSFERS=OFF to see if this might be a DMA conflict.
This suggests same as above, increase SPI bus divisor or troubleshoot disabling DMA. If DMA is detected to be the culprit, try changing up the DMA channels. Double check that /boot/config.txt does not have any dtoverlays regarding other SPI display drivers or touch screen controllers, and that it does NOT have a dtparam=spi=on line in it - fbcp-ili9341 does not use the Linux kernel SPI driver.
Check that the Pi is powered off of a power supply that can keep up with the voltage, and the low voltage icon is not showing up. (remove any avoid_warnings=1/2 directive from /boot/config.txt if that was used to get rid of warnings overlay, to check that voltage is good) It has been observed that if there is not enough power supplied, the display can be the first to starve, while the Pi might keep on running fine. Try removing turbo settings or lowering the clock speed if you have overclocked to verify that the display crash is not power usage related.
Double check the Data/Command (D/C) GPIO pin physically, and in CMake command line. Whenever fbcp-ili9341 refers to pin numbers, they are always specified in BCM pin numbers. Try setting a higher -DSPI_BUS_CLOCK_DIVISOR= value to CMake. Make sure no other fbcp programs or SPI drivers or dtoverlays are enabled.
If the colors looks off in some other fashion, it is possible that the display is just being driven at a too high SPI bus speed, in which case try making the display run slower by choosing a higher -DSPI_BUS_CLOCK_DIVISOR= option to CMake. Especially on ILI9486 displays it has been observed that the colors on the display can become distorted if the display is run too fast beyond its maximum capability.
fbcp-ili9341 needs a few megabytes of GPU memory to function if DMA transfers are enabled. The gpu_mem boot config option dictates how much of the Pi"s memory area is allocated to the GPU. By default this is 64MB, which has been observed to not leave enough memory for fbcp-ili9341 if HDMI is run at 1080p. If this error happens, try increasing GPU memory to e.g. 128MB by adding a line gpu_mem=128 in /boot/config.txt.
As the number of supported displays, Raspberry Pi device models, Raspbian/Retropie/Lakka OS versions, accompanied C++ compiler versions and fbcp-ili9341 build options have grown in number, there is a combinatorial explosion of all possible build modes that one can put the codebase through, so it is not easy to keep every possible combo tested all the time. Something may have regressed or gotten outdated. Stay calm, and report a bug.
You can also try looking through the commit history to find changes related to your configuration combo, to see if there"s a mention of a known good commit in time that should work for your case. If you get an odd compiler error on cmake or make lines, those will usually be very easy to fix, as they are most of the time a result of some configurational oversight.
First, make sure the display is a 4-wire SPI and not a 3-wire one. A display is 4-wire SPI if it has a Data/Control (DC) GPIO line that needs connecting. Sometimes the D/C pin is labeled RS (Register Select). Support for 3-wire SPI displays does exist, but it is experimental and not nearly as well tested as 4-wire displays.
In this list, Rated SPI Bus Speed is the maximum clock speed that the display controller is rated to run at. The Obtained Bus Speed column lists the fastest SPI bus speed that was achieved in practice, and the core_freq BCM Core speed and SPI Clock Divider CDIV setting that was used to achieve that rate. Note how most display controllers can generally be driven much faster than what they are officially rated at in their spec sheets.
The Frame Rate column shows the worst case frame rate when full screen updates are being performed. This occurs for example when watching fullscreen video (that is not a flat colored cartoon). Because fbcp-ili9341 only sends over the pixels that have changed, displays such as HX8357D and ILI9486 can still be used to play many games at 60fps. Retro games work especially well.
All the ILI9341 displays work nice and super fast at ~70-80MHz. My WaveShare 3.5" 320x480 ILI9486 display runs really slow compared to its pixel resolution, ~32MHz only. See fbcp-ili9341 ported to ILI9486 WaveShare 3.5" (B) SpotPear 320x480 SPI display for a video of this display in action. Adafruit"s 320x480 3.5" HX8357D PiTFTs is ~64% faster in comparison.
The ILI9486L controller based maithoga display runs a bit faster than ILI9486 WaveShare, 50MHz versus 31.88MHz, i.e. +56.8% bandwidth increase. However fps-wise maithoga reaches only 13.56 vs WaveShare 12.97 fps, because the bandwidth advantage is fully lost in pixel format differences: ILI9486L requires transmitting 24 bits per each pixel (R6G6B6 mode), whereas ILI9486 supports 16 bits per pixel R5G6B5 mode. This is reflected in the above chart refresh rate for the maithoga display (marked with a star).
If manufacturing variances turn out not to be high between copies, and you"d like to have a bigger 320x480 display instead of a 240x320 one, then it is recommended to avoid ILI9486, they indeed are slow.
The KeDei v6.3 display with MPI3501 controller takes the crown of being horrible, in all aspects imaginable. It is able to run at 33.33 MHz, but due to technical design limitations of the display (see #40), effective bus speed is halved, and only about 72% utilization of the remaining bus rate is achieved. DMA cannot be used, so CPU usage will be off the charts. Even though fbcp-ili9341 supports this display, level of support is expected to be poor, because the hardware design is a closed secret without open documentation publicly available from the manufacturer. Stay clear of KeDei or MPI3501 displays.
Search around, or ask the manufacturer of the display what the maximum SPI bus speed is for the device. This is the most important aspect to getting good frame rates, but unfortunately most web links never state the SPI speed rating, or they state it ridiculously low like in the spec sheets. Try and buy to see, or ask in some community forums from people who already have a particular display to find out what SPI bus speed it can achieve.
One might think that since Pi Zero is slower than a Pi 3, the SPI bus speed might not matter as much when running on a Pi Zero, but the effect is rather the opposite. To get good framerates on a Pi Zero, it should be paired with a display with as high SPI bus speed capability as possible. This is because the higher the SPI bus speed is, the more autonomously a DMA controller can drive it without CPU intervention. For the same reason, the interlacing technique does not (currently at least) perform well on a Pi Zero, so it is disabled there by default. ILI9341s run well on Pi Zero, ILI9486 on the other hand is quite difficult to combine with a Pi Zero.
Ultimately, it should be noted that parallel displays (DPI) are the proper method for getting fast framerates easily. SPI displays should only be preferred if display form factor is important and a desired product might only exist as SPI and not as DPI, or the number of GPIO pins that are available on the Pi is scarce that sacrificing dozens of pins to RGB data is not feasible.
Displays are generally manufactured to utilize one specific interfacing method, with the exception that some displays have a both I²C and SPI modes that can be configured via soldering.
Tomáš Suk, Cyril Höschl IV, and Jan Flusser, Rectangular Decomposition of Binary Images., a useful research paper about merging monochrome bitmap images to rectangles, which gave good ideas for optimizing SPI span merges across multiple scan lines,
If you would like to help push Raspberry Pi SPI display support further, there are always more things to do in the project. Here is a list of ideas and TODOs for recognized work items to contribute, roughly rated in order of increasing difficulty.
Vote up issue raspberrypi/userland/#440 if you would like to see Raspberry Pi Foundation improve CPU performance and reduce latency of the Pi when used with SPI displays.
Vote up issue raspberrypi/firmware/#992 if you would like to see Raspberry Pi SPI bus to have high throughput even when the Pi CPU is not under heavy CPU load (better SPI throughput with lower power consumption), a performance feature only SDHOST on the Pi currently enjoys.
If you have access to a high frequency scope/logic analyzer (~128MHz), audit the utilization of the SPI MOSI bus to find any remaining idle times on the bus, and analyze their sources.
Improve support for 3-wire displays, e.g. for 1) "17-bit" 3-wire communication, 2) fix up SPI_3WIRE_PROTOCOL + ALL_TASKS_SHOULD_DMA to work together, or 3) fix up SPI_3WIRE_PROTOCOL + OFFLOAD_PIXEL_COPY_TO_DMA_CPP to work together.
Optimize away unnecessary zero padding that 3-wire communication currently incurs, by keeping a queue of leftover untransmitted partial bits of a byte, and piggybacking them onto the next transfer that comes in.
Port the high performance DMA-based SPI communication technique from fbcp-ili9341 over to another project that uses the SPI bus for something else, for close to 100% saturation of the SPI bus in the project.
If you are knowledgeable with BCM2835 DMA, investigate whether the hacky dance where two DMA channels need to be used to reset and resume DMA SPI transfers when chaining, can be avoided?
If you have contacts with Broadcom, ask them to promote use of the SoC hardware with DMA chaining + mixed SPI & non-SPI tasks as a first class tested use case. Current DMA SPI hardware behavior of BCM2835 is, to say the least, surprising.

I"m in a project of a gameboy advance with a Orange pi inside. I found a 3d file of a case on web and I"m editing it, but I was stuck with the screen. I need a 2.8 to 3.2 inches screen, but those available at aliexpress and eBay wouldn"t fit because of the breakout board width. I found some bare lcds but was in doubt if it was a good idea using it, plugging it somehow with the Opi. I saw some FFC FPC connectors and I"m wondering if it"s work. Can I use them to do the same as you did or it doesn"t work for that? Any tips for the number of pins the screen and the connectors must have? I found a nice screen but it"s 18 pins, and the closest I could find was a 20 pins connector. Will it work the same or it has to have exactly the same number of pins?
Also: is there any other kind of screen I could use like that plugging on the gpio, but something quite like a plug and play stuff, I mean, something that doesn"t need any coding? Sorry for the many questions, I"m still a learner so there are still a lot of doubts lol btw, thanks by now, mate
This 5" Touch Screen Hat connects to your Raspberry Pi"s HDMI port for video and GPIO ports for power and touch capabilities. Just place the 5" Touch Screen Shield on top of your Raspberry Pi, run the appropriate software and attach the HDMI coupler to see your desktop! Use your finger or the included stylus to move the mouse pointer on the screen!
In a recent Raspberry Pi Geek article [1], I showed how to make short videos for small, portable Raspberry Pi-powered devices, such as my fourth-generation Steampunk conference badge (Figure 1).
This time, I"ll explain how to get that little 1.8-inch TFT color display [2] working on a Raspberry Pi, so you can show your own movies. Maybe you"d like to build your own conference badge, a video picture frame, or a small animated sign. The Rasp Pi is definitely fast enough to run videos at 30 frames per second on the little screen.
My conference badge runs on a Raspberry Pi 2 (RPi2) Model B [3]. Fortunately, you can successfully use small TFT displays with the earlier Raspberry Pi 1 (RPi1) model B+, as well, by simply moving the microSD card, keyboard, mouse, and cables over to the RPi1 and then restarting everything. There"s no lag or problems running videos with either model.
You might want to consider not moving up to the latest Raspbian Jessie release, because the application that plays a movie – MPlayer [5] – has been swapped out for the now unsupported MPlayer2. At the time of writing, the required FBDev modules for MPlayer2 were not installed in the release, so the application refused to play a movie on a tiny display using the framebuffer. It works fine for an HDMI-attached big screen in an X window-based desktop, just not on a small LCD running as a framebuffer.
I spent considerable time trying to troubleshoot the problem and was unable to find a way to get MPlayer2 to work. Even worse, the regular MPlayer application isn"t offered as an option in Jessie. As a result, when working with the small LCD displays connected to the GPIO pins, you should stick with Wheezy until the problem has been sorted out. Using Wheezy is a practical solution, and it"s absolutely capable of providing a great wearable-device experience, especially on the quad-core, 1GB RAM-equipped RPi2.
I built my cable from an old 40-pin PC IDE hard drive ribbon connector, some repurposed 22-gauge wire from a Category 5 (CAT5) cable, and a 10-pin female connector. Take the retainer off the ribbon connector and gently remove the ribbon cable from the pins. I then soldered the CAT5 wires to the tiny pins using a 25-watt soldering iron. A "helping hand" device was instrumental in lining the tiny wires up to the tiny connector pins.
The plastic around the pins and wire insulation melt quickly, so use as little heat as possible when making the connections. A traditional magnifying work light is also invaluable for getting the right wire on the right connector. Figure 2 shows a close-up view of the connector that attaches to the Pi.
Being able to swap parts around quickly is important, because I have a number of different projects in the works at any one time, and I usually don"t have boxes of extra TFT displays and other components just lying around. Using parts in multiple projects is a fact of my technology writing life. Happily, connectors are cheap, and I go to the little extra effort of using them on everything to facilitate rapid prototyping of my mix-and-match tech project schemes.
You"ll need 10 wires going from the Pi 40-pin connector to the TFT display"s 10-pin terminator (Figures 3 and 4). I split a couple of CAT5 cables and extracted the pairs, covered one end with tape, and snaked them through a length of 3/8-inch thick woven paracord, with the inner core removed. The covering gives an antique Steampunk look to the cord on my conference badge. I lightly melted the ends of the cover, to keep it from unraveling. Some tightly wound wire kept the ends from bunching toward the center of the cable.
Copying the image onto the card should take about three to five minutes. When completed remove the card from the Linux notebook and insert it into the Raspberry Pi"s card slot. Apply power, and you"ll immediately go into the raspi-config app.
Table 2 shows the settings I changed while in raspi-config. Pay particular attention to expanding the filesystem, enabling SSH, and enabling/loading the SPI drivers. If you forget to expand the filesystem, installing the display drivers from the rpi-update process will fail with an out-of-disk-space error.
Enabling SSH lets you log into and control the RPi2 remotely without a monitor, such as in a wearable conference badge situation. Once the Rasp Pi reboots, log in to the command line in a terminal.
The kernel drivers included in Raspbian Wheezy must be installed before they"ll work, which is accomplished with an rpi-update to the firmware. Make sure you have connectivity to the Internet; otherwise, the update will fail here, as well. Fortunately, Raspbian uses the wired Ethernet connection, out of the box, so this shouldn"t be a problem if you can connect a cable to the Rasp Pi and the router. Alternately, you"ll have to log in to the Pi while hooked up to a monitor to set your access point and WiFi passcode.
Keep an eye on the LCD screen, and you should see the backlight come on after a short period. If you have a 2.2-inch display, use adafruit22 as the device name. Other displays have similar designations.
You"ll also need a short video file to display on the color LCD. I had some on my Linux notebook, in my drtorq directory and copied them over to the Raspberry Pi:
The RPi LCD can be driven in two ways: Method 1. install driver to your Raspbian OS. Method 2. use the Ready-to-use image file of which LCD driver was pre-installed.
2) Connect the TF card to the PC, open the Win32DiskImager software, select the system image downloaded in step 1 and click‘Write’ to write the system image. ( How to write an image to a micro SD card for your Pi? See RPi Image Installation Guides for more details)
3) Connect the TF card to the Raspberry Pi, start the Raspberry Pi. The LCD will display after booting up, and then log in to the Raspberry Pi terminal,(You may need to connect a keyboard and HDMI LCD to Pi for driver installing, or log in remotely with SSH)
1. Executing apt-get upgrade will cause the LCD to fail to work properly. In this case, you need to edit the config.txt file in the SD card and delete this sentence: dtoverlay=ads7846.
This LCD can be calibrated through the xinput-calibrator program. Note: The Raspberry Pi must be connected to the network, or else the program won"t be successfully installed.

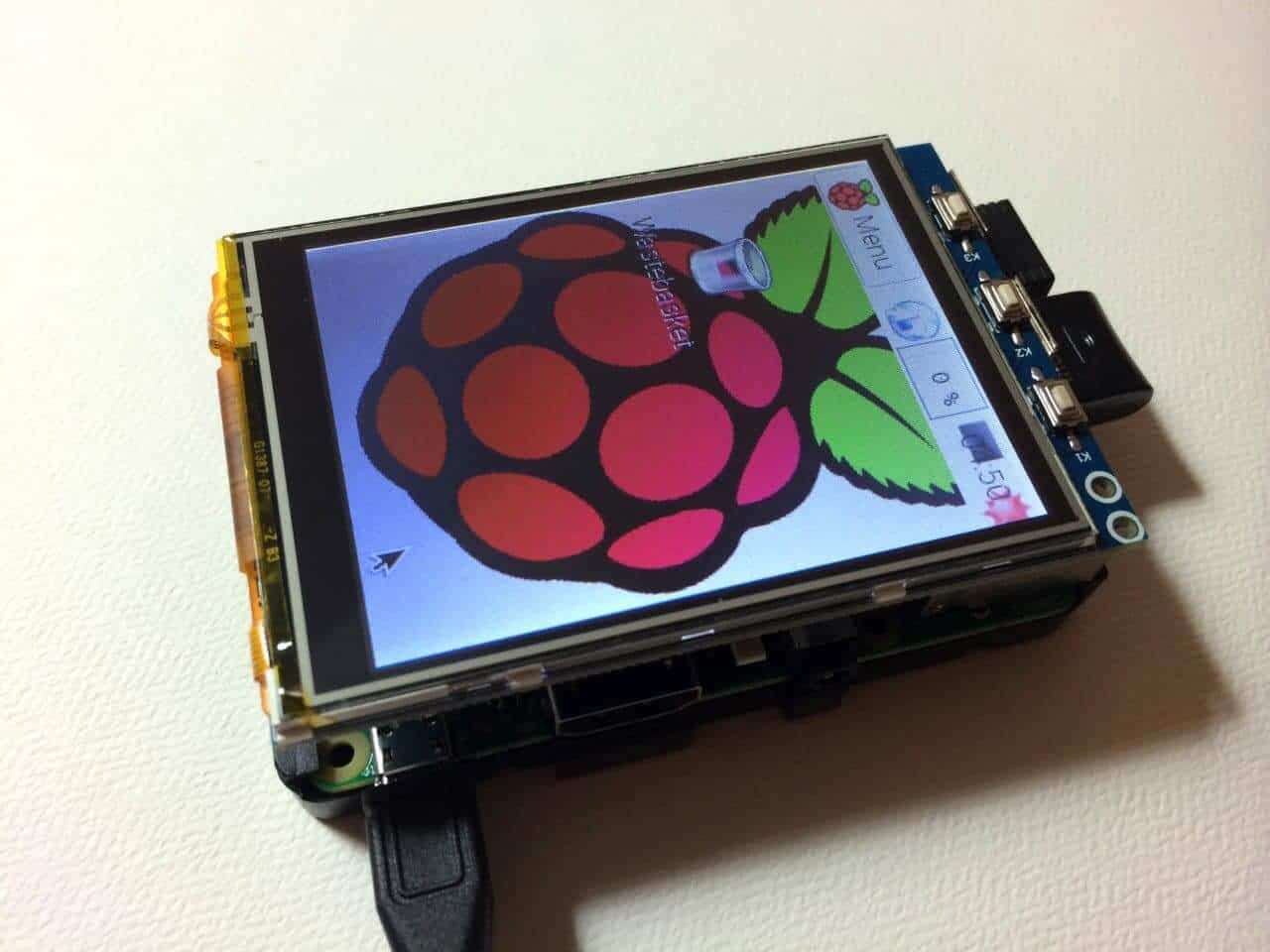
I needed a display for a new project that I am working on and saw that the 3.5 RPI Display Board was on sale and decided to pick one up. I"ve previously used mini OLED displays before, but they"re pretty limited by its size and the colors that it can display. This is a 480x320 resolution device that is designed to affix right onto the Raspberry Pi (RPi) GPIO pins. The installation is simple as you"d imagine:
I am using a vanilla Raspbian lite and no additional drivers were required to get this working. All we need to do is configure some boot scripts and introduce some new configuration files. It"s possible to do this manually, but thankfully LCD-Show automates the process for us.
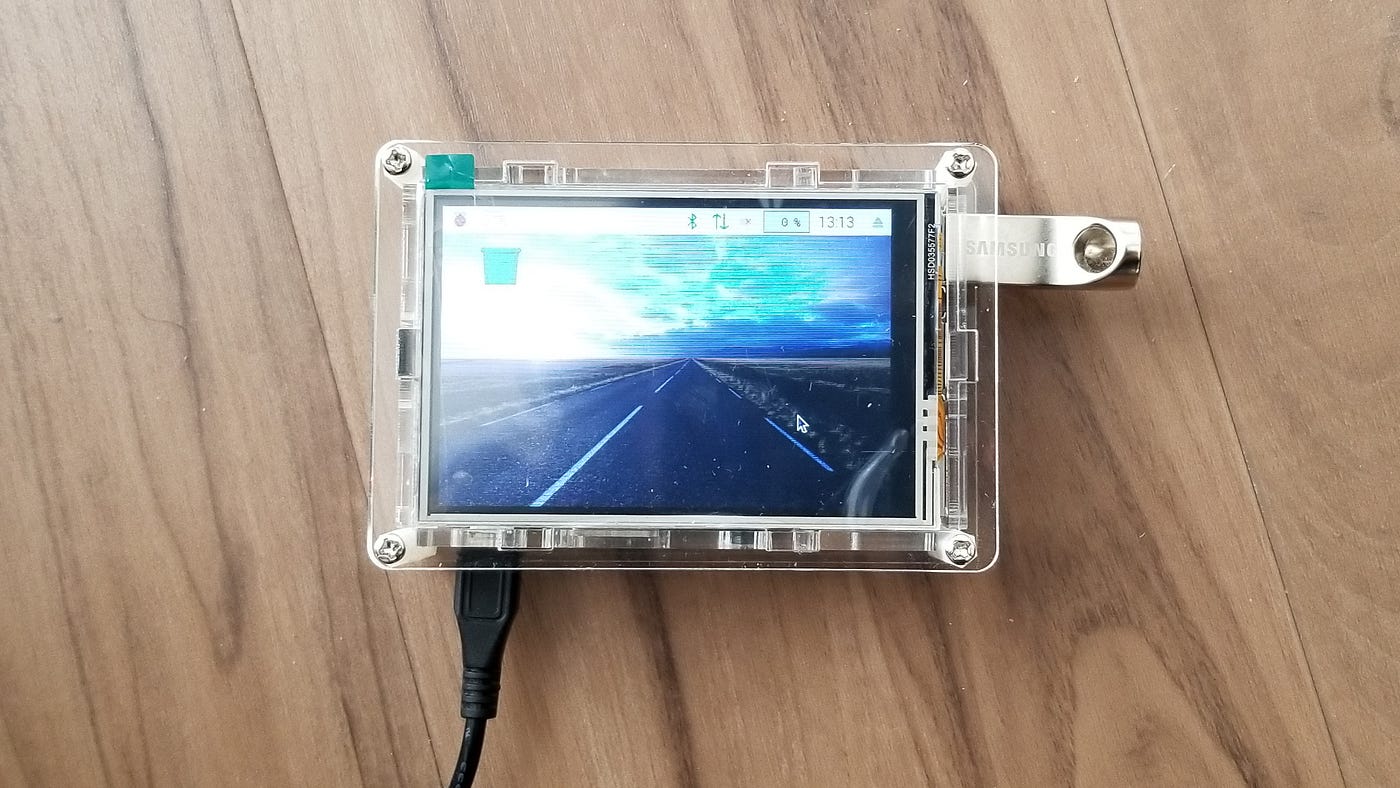
It would have been nice if I could have mirrored the HDMI output and the LCD panel at the same time, but I could not figure out how to do this or if it was possible at all.
The LCD is compatible with both the Raspberry PI Zero and its big brother variants so these same instructions can be applied to get them both running.
A number of people have used a Motorola Atrix Lapdock to add a screen and keyboard with trackpad to RasPi, in essence building a RasPi-based laptop computer. Lapdock is a very clever idea: you plug your Atrix smart phone into Lapdock and it gives you an 11.6" 1366 x 768 HDMI monitor with speakers, a keyboard with trackpad, two USB ports, and a large enough battery for roughly 5 hours of use. The smart phone acts as a motherboard with "good enough" performance. The advantage over a separate laptop or desktop computer is that you have one computing device so you don"t need to transfer files between your phone and your desk/laptop.
Unfortunately for Motorola, Lapdock was not successful (probably because of its US$500 list price) and Motorola discontinued it and sold remaining stock at deep discounts, with many units selling for US$50-100. This makes it a very attractive way to add a modest size HDMI screen to RasPi, with a keyboard/trackpad and rechargeable battery power thrown in for free.
Lapdock has two connectors that plug into an Atrix phone: a Micro HDMI D plug for carrying video and sound, and a Micro USB plug for charging the phone and connecting to the Lapdock"s internal USB hub, which talks to the Lapdock keyboard, trackpad, and two USB ports. With suitable cables and adapters, these two plugs can be connected to RasPi"s full-size HDMI connector and one of RasPi"s full-size USB A ports.
The RasPi forum has a long thread on Lapdock with many useful suggestions, photos, and links: I made a Raspberry PI Laptop. There"s also a good "blog entry at element14 with photos and suggestions of where to get cables and adapters: Raspberry Pi Laptop. TechRepublic has a tear-down article with photos of Lapdock internal components here: Cracking Open the Motorola Droid Bionic Lapdock. Paul Mano has a wealth of photos of Lapdock innards at Motorola Atrix Lapdock mod projects.
Lapdock uses the HDMI plug to tell if a phone is plugged in by seeing if the HDMI DDC/CEC ground pin is pulled low. If it"s not, Lapdock is powered off. As soon as you plug in a phone or RasPi, all the grounds short together and Lapdock powers itself on. However, it only does this if the HDMI cable actually connects the DDC/CEC ground line. Many cheap HDMI cables do not include the individual ground lines, and rely on a foil shield connected to the outer shells on both ends. Such a cable will not work with an unmodified Lapdock. There is a detailed "blog entry on the subject at element14: Raspberry Pi Lapdock HDMI cable work-around. The "blog describes a side-benefit of this feature: you can add a small power switch to Lapdock so you can leave RasPi attached all the time without draining the battery.
The Lapdock Micro USB plug is the upstream port of Lapdock"s internal USB hub, and connects to one of RasPi"s full-size USB ports. Lapdock is not USB compliant since it provides upstream power on its Vbus pin. Lapdock uses this to charge the Atrix phone. You can use this feature to power RasPi if you have a newer RasPi. The original RasPi rev 1 has 140 mA polyfuses F1 and F2 to protect the USB ports, which are too small for powering RasPi using upstream power. Newer RasPis replace F1 and F2 with zero Ohm jumpers or eliminate them entirely, which allows Lapdock to provide power. If you don"t mind modifying your original RasPi, you can add shorting jumpers over F1 and F2 or replace them with higher-current fuses.
What gets powered on depends on whether Lapdock is open or closed. If it"s open, the screen and all Lapdock USB ports are powered. If you close Lapdock, the screen and full-size USB ports are powered down, but the Micro USB still provides upstream power. This is for charging an Atrix phone. When you open or close Lapdock, the Micro USB power switches off for about a second so if your RasPi is connected it will reboot and you may have a corrupted file system. There"s discussion about this at the RasPi forum link, and someone has used a supercapacitor to work around the problem: Raspberry Pi lapdock tricks.
When you do not connect a HDMI monitor, the GPU in the PI will simply rescale (http://en.wikipedia.org/wiki/Image_scaling) anything that would have appeared on the HDMI screen to a resolution suitable for the TV standard chosen, (PAL or NTSC) and outputs it as a composite video signal.
The Broadcom BCM2835 only provides HDMI output and composite output. RGB and other signals needed by RGB, S-VIDEO or VGA connectors are however not provided, and the R-PI also isn"t designed to power an unpowered converter box.
Note that any conversion hardware that converts HDMI/DVI-D signals to VGA (or DVI-A) signals may come with either an external PSU, or expects power can



 Ms.Josey
Ms.Josey 
 Ms.Josey
Ms.Josey