
debian 5 lcd touch screen drivers free sample

Raspberry Pi leads out 40 GPIO pins, while the screen leads out 26 pins. When connecting, pay attention to the corresponding pins and Raspberry Pi pins.
5) Insert the TF card into the Raspberry Pi, power on the Raspberry Pi, and wait for more than 10 seconds to display normally. But the touch is abnormal at that time, and the touch needs to be calibrated as the following steps.
3. After reboot, the touch will work normally under normal circumstances. But for different resistance screens, the accuracy of using the default calibration parameters may not be very suitable.
You can perform touch calibration by clicking the Raspberry Pi icon on the taskbar, selecting Preferences -> Calibrate Touchscreen, and following the displayed prompts.
4. After calibration, the following data will be displayed. If you want to save these touch values, you can replace the data in the red circle with the data in the corresponding position in 99-calibration.conf.
The installation of xserver-xorg-input-evdev and xinput-calibrator in Ubuntu system reports an error, so the touch cannot be used normally. How to solve it?
The installation of xserver-xorg-input-evdev and xinput-calibrator in Kali system reports an error, so the touch cannot be used normally. How to solve it?
This project utilizes the Terasic Multimedia Touch Panel Daughter Board (MTDB) to add an LCD touch screen and a PS/2 keyboard to the Altera SOC board. This project allows you to boot linux with the penguin on the LCD screen and run X windows. Also it allows you to use the peripherals on the MTDB as input devices. Most of the drivers were taken from the Nios 2 kernel development tree or adapted from the old NEEK application selector example. This project can be done using the features of the 13.0 release.
You may need to add "console=tty0" to you kernel boot command line. You can do this in uboot. You can also have serial and lcd as your console(I recomend this)
In these videos, the SPI (GPIO) bus is referred to being the bottleneck. SPI based displays update over a serial data bus, transmitting one bit per clock cycle on the bus. A 320x240x16bpp display hence requires a SPI bus clock rate of 73.728MHz to achieve a full 60fps refresh frequency. Not many SPI LCD controllers can communicate this fast in practice, but are constrained to e.g. a 16-50MHz SPI bus clock speed, capping the maximum update rate significantly. Can we do anything about this?
The fbcp-ili9341 project started out as a display driver for the Adafruit 2.8" 320x240 TFT w/ Touch screen for Raspberry Pi display that utilizes the ILI9341 controller. On that display, fbcp-ili9341 can achieve a 60fps update rate, depending on the content that is being displayed. Check out these videos for examples of the driver in action:
Given that the SPI bus can be so constrained on bandwidth, how come fbcp-ili9341 seems to be able to update at up to 60fps? The way this is achieved is by what could be called adaptive display stream updates. Instead of uploading each pixel at each display refresh cycle, only the actually changed pixels on screen are submitted to the display. This is doable because the ILI9341 controller, as many other popular controllers, have communication interface functions that allow specifying partial screen updates, down to subrectangles or even individual pixel levels. This allows beating the bandwidth limit: for example in Quake, even though it is a fast pacing game, on average only about 46% of all pixels on screen change each rendered frame. Some parts, such as the UI stay practically constant across multiple frames.
Undocumented BCM2835 features are used to squeeze out maximum bandwidth: SPI CDIV is driven at even numbers (and not just powers of two), and the SPI DLEN register is forced in non-DMA mode to avoid an idle 9th clock cycle for each transferred byte.
Likewise, if you have any touch controller related dtoverlays active, such as dtoverlay=ads7846,... or anything that has a penirq= directive, those should be removed as well to avoid conflicts. It would be possible to add touch support to fbcp-ili9341 if someone wants to take a stab at it.
-DPIRATE_AUDIO_ST7789_HAT=ON: If specified, targets a Pirate Audio 240x240, 1.3inch IPS LCD display HAT for Raspberry Pi with ST7789 display controller
-DKEDEI_V63_MPI3501=ON: If specified, targets a KeDei 3.5 inch SPI TFTLCD 480*320 16bit/18bit version 6.3 2018/4/9 display with MPI3501 display controller.
-DSPI_BUS_CLOCK_DIVISOR=even_number: Sets the clock divisor number which along with the Pi core_freq= option in /boot/config.txt specifies the overall speed that the display SPI communication bus is driven at. SPI_frequency = core_freq/divisor. SPI_BUS_CLOCK_DIVISOR must be an even number. Default Pi 3B and Zero W core_freq is 400MHz, and generally a value -DSPI_BUS_CLOCK_DIVISOR=6 seems to be the best that a ILI9341 display can do. Try a larger value if the display shows corrupt output, or a smaller value to get higher bandwidth. See ili9341.h and waveshare35b.h for data points on tuning the maximum SPI performance. Safe initial value could be something like -DSPI_BUS_CLOCK_DIVISOR=30.
-DBACKLIGHT_CONTROL=ON: If set, enables fbcp-ili9341 to control the display backlight in the given backlight pin. The display will go to sleep after a period of inactivity on the screen. If not, backlight is not touched.
-DSTATISTICS=number: Specifies the level of overlay statistics to show on screen. 0: disabled, 1: enabled, 2: enabled, and show frame rate interval graph as well. Default value is 1 (enabled).
Here is a full example of what to type to build and run, if you have the Adafruit 2.8" 320x240 TFT w/ Touch screen for Raspberry Pi with ILI9341 controller:
The refresh speed of the display is dictated by the clock speed of the SPI bus that the display is connected to. Due to the way the BCM2835 chip on Raspberry Pi works, there does not exist a simple speed=xxx Mhz option that could be set to define the bus speed. Instead, the SPI bus speed is derived from two separate parameters: the core frequency of the BCM2835 SoC in general (core_freq in /boot/config.txt), and the SPI peripheral CDIV (Clock DIVider) setting. Together, the resulting SPI bus speed is then calculated with the formula SPI_speed=core_freq/CDIV.
Ensure turbo speed. This is critical for good frame rates. On the Raspberry Pi 3 Model B, the BCM2835 core runs by default at 400MHz (resulting in 400/CDIV MHz SPI speed) if there is enough power provided to the Pi, and if the CPU temperature does not exceed thermal limits. If the CPU is idle, or voltage is low, the BCM2835 core will instead revert to non-turbo 250MHz state, resulting in 250/CDIV MHz SPI speed. This effect of turbo speed on performance is significant, since 400MHz vs non-turbo 250MHz comes out to +60% of more bandwidth. Getting 60fps in Quake, Sonic or Tyrian often requires this turbo frequency, but e.g. NES and C64 emulated games can often reach 60fps even with the stock 250MHz. If for some reason under-voltage protection is kicking in even when enough power should be fed, you can force-enable turbo when low voltage is present by setting the value avoid_warnings=2 in the file /boot/config.txt.
Perhaps a bit counterintuitively, underclock the core. Setting a smaller core frequency than the default turbo 400MHz can enable using a smaller clock divider to get a higher resulting SPI bus speed. For example, if with default core_freq=400 SPI CDIV=8 works (resulting in SPI bus speed 400MHz/8=50MHz), but CDIV=6 does not (400MHz/6=66.67MHz was too much), you can try lowering core_freq=360 and set CDIV=6 to get an effective SPI bus speed of 360MHz/6=60MHz, a middle ground between the two that might perhaps work. Balancing core_freq= and CDIV options allows one to find the maximum SPI bus speed up to the last few kHz that the display controller can tolerate. One can also try the opposite direction and overclock, but that does then of course have all the issues that come along when overclocking. Underclocking does have the drawback that it makes the Pi run slower overall, so this is certainly a tradeoff.
The main option to control CPU usage vs performance aspect is the option #define ALL_TASKS_SHOULD_DMA in config.h. Enabling this option will greatly reduce CPU usage. If this option is disabled, SPI bus utilization is maximized but CPU usage can be up to 80%-120%. When this option is enabled, CPU usage is generally up to around 15%-30%. Maximal CPU usage occurs when watching a video, or playing a fast moving game. If nothing is changing on the screen, CPU consumption of the driver should go down very close to 0-5%. By default #define ALL_TASKS_SHOULD_DMA is enabled for Pi Zero, but disabled for Pi 3B.
If your SPI display bus is able to run really fast in comparison to the size of the display and the amount of content changing on the screen, you can try enabling #define UPDATE_FRAMES_IN_SINGLE_RECTANGULAR_DIFF option in config.h to reduce CPU usage at the expense of increasing the number of bytes sent over the bus. This has been observed to have a big effect on Pi Zero, so is worth checking out especially there.
A pleasing aspect of fbcp-ili9341 is that it introduces very little latency overhead: on a 119Hz refreshing ILI9341 display, fbcp-ili9341 gets pixels as response from GPIO input to screen in well less than 16.66 msecs time. I only have a 120fps recording camera, so can"t easily measure delays shorter than that, but rough statistical estimate of slow motion video footage suggests this delay could be as low as 2-3 msecs, dominated by the ~8.4msecs panel refresh rate of the ILI9341.
Interestingly, fbcp-ili9341 is about ~33msecs faster than a cheap 3.5" KeDei HDMI display. I do not know if this is a result of the KeDei HDMI display specifically introducing extra latency, or if all HDMI displays connected to the Pi would have similar latency overhead. An interesting question is also how SPI would compare with DPI connected displays on the Pi.
Unfortunately a limitation of SPI connected displays is that the VSYNC line signal is not available on the display controllers when they are running in SPI mode, so it is not possible to do vsync locked updates even if the SPI bus bandwidth on the display was fast enough. For example, the 4 ILI9341 displays I have can all be run faster than 75MHz so SPI bus bandwidth-wise all of them would be able to update a full frame in less than a vsync interval, but it is not possible to synchronize the updates to vsync since the display controllers do not report it. (If you do know of a display that does actually expose a vsync clock signal even in SPI mode, you can try implementing support to locking on to it)
To get tearing free updates, you should use a DPI display, or a good quality HDMI display. Beware that cheap small 3.5" HDMI displays such as KeDei do also tear - that is, even if they are controlled via HDMI, they don"t actually seem to implement VSYNC timed internal operation.
The main option that affects smoothness of display updates is the #define USE_GPU_VSYNC line in config.h. If this is enabled, then the internal Pi GPU HDMI vsync clock is used to drive frames onto the display. The Pi GPU clock runs at a fixed rate that is independent of the content. This rate can be discovered by running tvservice -s on the Pi console, and is usually 59Hz or 60Hz. If your application renders at this rate, animation will look smooth, but if not, there will be stuttering. For example playing a PAL NES game that updates at 50Hz with HDMI clock set at 60Hz will cause bad microstuttering in video output if #define USE_GPU_VSYNC is enabled.
The codebase captures screen framebuffers by snapshotting via the VideoCore vc_dispmanx_snapshot() API, and the obtained pixels are then routed on to the SPI-based display. This kind of polling is performed, since there does not exist an event-based mechanism to get new frames from the GPU as they are produced. The result is inefficient and can easily cause stuttering, since different applications produce frames at different paces. Ideally the code would ask the VideoCore API to receive finished frames in callback notifications immediately after they are rendered, but this kind of functionality does not exist in the current GPU driver stack. In the absence of such event delivery mechanism, the code has to resort to polling snapshots of the display framebuffer using carefully timed heuristics to balance between keeping latency and stuttering low, while not causing excessive power consumption. These heuristics keep continuously guessing the update rate of the animation on screen, and they have been tuned to ensure that CPU usage goes down to 0% when there is no detected activity on screen, but it is certainly not perfect. This GPU limitation is discussed at raspberrypi/userland#440. If you"d like to see fbcp-ili9341 operation reduce latency, stuttering and power consumption, please throw a (kind!) comment or a thumbs up emoji in that bug thread to share that you care about this, and perhaps Raspberry Pi engineers might pick the improvement up on the development roadmap. If this issue is resolved, all of the #define USE_GPU_VSYNC, #define SAVE_BATTERY_BY_PREDICTING_FRAME_ARRIVAL_TIMES and #define SELF_SYNCHRONIZE_TO_GPU_VSYNC_PRODUCED_NEW_FRAMES hacks from the previous section could be deleted from the driver, hopefully leading to a best of all worlds scenario without drawbacks.
Currently if one resizes the video frame size at runtime, this causes DispmanX API to go sideways. See raspberrypi/userland#461 for more information. Best workaround is to set the desired screen resolution in /boot/config.txt and configure all applications to never change that at runtime.
The speed of the SPI bus is linked to the BCM2835 core frequency. This frequency is at 250MHz by default (on e.g. Pi Zero, 3B and 3B+), and under CPU load, the core turbos up to 400MHz. This turboing directly scales up the SPI bus speed by 400/250=+60% as well. Therefore when choosing the SPI CDIV value to use, one has to pick one that works for both idle and turbo clock speeds. Conversely, the BCM core reverts to non-turbo speed when there is only light CPU load active, and this slows down the display, so if an application is graphically intensive but light on CPU, the SPI display bus does not get a chance to run at maximum speeds. A way to work around this is to force the BCM core to always stay in its turbo state with force_turbo=1 option in /boot/config.txt, but this has an unfortunate effect of causing the ARM CPU to always run in turbo speed as well, consuming excessive amounts of power. At the time of writing, there does not yet exist a good solution to have both power saving and good performance. This limitation is being discussed in more detail at raspberrypi/firmware#992.
At the moment fbcp-ili9341 is only likely to work on 32-bit OSes, on Raspbian/Ubuntu/Debian family of distributions, where Broadcom and DispmanX libraries are available. 64-bit operating systems do not currently work (see issue #43). It should be possible to port the driver to 64-bit and other OSes, though the amount of work has not been explored.
By default fbcp-ili9341 builds with a statistics overlay enabled. See the video fbcp-ili9341 ported to ILI9486 WaveShare 3.5" (B) SpotPear 320x480 SPI display to find details on what each field means. Build with CMake option -DSTATISTICS=0 to disable displaying the statistics. You can also try building with CMake option -DSTATISTICS=2 to show a more detailed frame delivery timings histogram view, see screenshot and video above.
This has only been tested on my Adafruit SSD1351 128x96 RGB OLED display, which can be soldered to operate in 3-wire SPI mode, so testing has not been particularly extensive.
At the moment one cannot utilize the XPT2046/ADS7846 touch controllers while running fbcp-ili9341, so touch is mutually incompatible with this driver. In order for fbcp-ili9341 to function, you will need to remove all dtoverlays in /boot/config.txt related to touch.
Easiest way to do permanent damage is to fail at wiring, e.g. drive 5 volts if your display requires 3.3v, or short a connection, or something similar.
Yes, fbcp-ili9341 shows the output of the HDMI display on the SPI screen, and both can be attached at the same time. A HDMI display does not have to be connected however, although fbcp-ili9341 operation will still be affected by whatever HDMI display mode is configured. Check out tvservice -s on the command line to check what the current DispmanX HDMI output mode is.
At the moment fbcp-ili9341 has been developed to only display the contents of the main DispmanX GPU framebuffer over to the SPI display. That is, the SPI display will show the same picture as the HDMI output does. There is no technical restriction that requires this though, so if you know C/C++ well, it should be a manageable project to turn fbcp-ili9341 to operate as an offscreen display library to show a completely separate (non-GPU-accelerated) image than what the main HDMI display outputs. For example you could have two different outputs, e.g. a HUD overlay, a dashboard for network statistics, weather, temps, etc. showing on the SPI while having the main Raspberry Pi desktop on the HDMI.
double check that the display controller is really what you expected. Trying to drive with the display with wrong initialization code usually results in the display not reacting, and the screen stays white,
This suggests that the power line or the backlight line might not be properly connected. Or if the backlight connects to a GPIO pin on the Pi (and not a voltage pin), then it may be that the pin is not in correct state for the backlight to turn on. Most of the LCD TFT displays I have immediately light up their backlight when they receive power. The Tontec one has a backlight GPIO pin that boots up high but must be pulled low to activate the backlight. OLED displays on the other hand seem to stay all black even after they do get power, while waiting for their initialization to be performed, so for OLEDs it may be normal for nothing to show up on the screen immediately after boot.
fbcp-ili9341 runs a clear screen command at low speed as first thing after init, so if that goes through, it is a good sign. Try increasing -DSPI_BUS_CLOCK_DIVISOR= CMake option to a higher number to see if the display driving rate was too fast. Or try disabling DMA with -DUSE_DMA_TRANSFERS=OFF to see if this might be a DMA conflict.
This suggests same as above, increase SPI bus divisor or troubleshoot disabling DMA. If DMA is detected to be the culprit, try changing up the DMA channels. Double check that /boot/config.txt does not have any dtoverlays regarding other SPI display drivers or touch screen controllers, and that it does NOT have a dtparam=spi=on line in it - fbcp-ili9341 does not use the Linux kernel SPI driver.
Double check the Data/Command (D/C) GPIO pin physically, and in CMake command line. Whenever fbcp-ili9341 refers to pin numbers, they are always specified in BCM pin numbers. Try setting a higher -DSPI_BUS_CLOCK_DIVISOR= value to CMake. Make sure no other fbcp programs or SPI drivers or dtoverlays are enabled.
The Frame Rate column shows the worst case frame rate when full screen updates are being performed. This occurs for example when watching fullscreen video (that is not a flat colored cartoon). Because fbcp-ili9341 only sends over the pixels that have changed, displays such as HX8357D and ILI9486 can still be used to play many games at 60fps. Retro games work especially well.
All the ILI9341 displays work nice and super fast at ~70-80MHz. My WaveShare 3.5" 320x480 ILI9486 display runs really slow compared to its pixel resolution, ~32MHz only. See fbcp-ili9341 ported to ILI9486 WaveShare 3.5" (B) SpotPear 320x480 SPI display for a video of this display in action. Adafruit"s 320x480 3.5" HX8357D PiTFTs is ~64% faster in comparison.
The ILI9486L controller based maithoga display runs a bit faster than ILI9486 WaveShare, 50MHz versus 31.88MHz, i.e. +56.8% bandwidth increase. However fps-wise maithoga reaches only 13.56 vs WaveShare 12.97 fps, because the bandwidth advantage is fully lost in pixel format differences: ILI9486L requires transmitting 24 bits per each pixel (R6G6B6 mode), whereas ILI9486 supports 16 bits per pixel R5G6B5 mode. This is reflected in the above chart refresh rate for the maithoga display (marked with a star).
The KeDei v6.3 display with MPI3501 controller takes the crown of being horrible, in all aspects imaginable. It is able to run at 33.33 MHz, but due to technical design limitations of the display (see #40), effective bus speed is halved, and only about 72% utilization of the remaining bus rate is achieved. DMA cannot be used, so CPU usage will be off the charts. Even though fbcp-ili9341 supports this display, level of support is expected to be poor, because the hardware design is a closed secret without open documentation publicly available from the manufacturer. Stay clear of KeDei or MPI3501 displays.
The Tontec MZ61581 controller based 320x480 3.5" display on the other hand can be driven insanely fast at up to 140MHz! These seem to be quite hard to come by though and they are expensive. Tontec seems to have gone out of business and for example the domain itontec.com from which the supplied instructions sheet asks to download original drivers from is no longer registered. I was able to find one from eBay for testing.
If you are knowledgeable with BCM2835 DMA, investigate whether the hacky dance where two DMA channels need to be used to reset and resume DMA SPI transfers when chaining, can be avoided?
If you have contacts with Broadcom, ask them to promote use of the SoC hardware with DMA chaining + mixed SPI & non-SPI tasks as a first class tested use case. Current DMA SPI hardware behavior of BCM2835 is, to say the least, surprising.
Touch drivers can be installed onto a Windows Embedded system using either Direct Image Integration or Existing Operating System (Manual) Installation:Manual Installation: it may be possible to install the touch driver onto an existing Windows Embedded machine using the standard Windows driver installer. This requires a system with writable media and with write filters properly configured. The installer also requires several Windows components which might be missing on an embedded system.If you purchased a Windows Embedded system with a pre-installed operating system and the above requirements are met, choose this driver.

and connect the other end of the USB cable to the USB port of the LCD; then supply power to Raspberry Pi; after that if the display and touch both are OK,

In Android, every window gets implemented with an underlying Surface object, an object that gets placed on the framebuffer by SurfaceFlinger, the system-wide screen composer. Each Surface is double-buffered. The back buffer is where drawing takes place and the front buffer is used for composition.
means that it gets displayed and becomes available again. Android flips the front and back buffers, ensuring a minimal amount of buffer copying and that there is always a buffer for SurfaceFlinger to use for composition (which ensures that the screen never flickers or shows artifacts).
Android makes two requirements of the driver: a linear address space of mappable memory that it can write to directly and support for the rgb_565 pixel format. A typical frame display includes:
using FBIOPUT_VSCREENINFO ioctl to attempt to create a virtual display twice the size of the physical screen and to set the pixel format to rgb_565. If this succeeds, double buffering is accomplished with video memory.
When a page flip is required, Android makes another FBIOPUT_VSCREENINFO ioctl call with a new y-offset pointing to the other buffer in video memory. This ioctl, in turn, invokes the driver"s .fb_pan_display function in order to do the actual flip. If there isn"t sufficient video memory, regular memory is used and is just copied into the video memory when it is time do the flip. After allocating the video memory and setting the pixel format, Android uses mmap() to map the memory into the process"s address space. All writes to the frame buffer are done through this mmaped memory.
To maintain adequate performance, framebuffer memory should be cacheable. If you use write-back, flush the cache before the frame buffer is written from DMA to the LCD. If that isn"t possible, you may use write-through. As a last resort, you can also use uncached memory with the write-bugger enabled, but performance will suffer.
Number keys: In the dialer application, when a number key is pressed to dial a phone number, the number doesn"t display on the screen until after the next number has been pressed.

If you ever tried to set up a touchscreen device in linux, you might have noticed that it is either working out of the box (besides some calibration) or is very tedious, especially when it is not supported by the kernel.
This article assumes that your touchscreen device is supported by the kernel (e.g. by the usbtouchscreen module). That means there exists a /dev/input/event* node for your device. Check out
for every of your event nodes while touching the display. If you found the corresponding node, it is likely that you will be able to get the device working.
There is a hack to emulates this scrolling behavior for every application in #Touchegg, but the X server still handles it as text selection (at least with Plasma).
To use multiple displays (some of which are touchscreens), you need to tell Xorg the mapping between the touch surface and the screen. This can be achieved with xinput as follows.
You can automate this by putting these commands in your ~/.xinitrc or similar. The mapping will be lost if the touchscreen is disconnected and re-connected, for example, when switching monitors via a KVM. In that case it is better to use a udev rule. The Calibrating Touchscreen page has an example udev rule for the case when a transformation matrix has been calculated manually and needs to be applied automatically.
Wayland does not currently have a known method to lock touching to a specific display. There are tools such as weston-touch-calibrator, but Gnome Wayland uses XWayland leaving the calibrator unable to locate any touchscreen.
Wayland/XWayland also masks the xinput list and funnels them down to generic xwayland devices such as "xwayland-pointer","xwayland-relative-pointer","xwayland-touch-pointer", etc. The Wayland method of "Xinput" is "Libinput", but does not have all the same functionality. The current known method to use touchscreens in a multi-head setup is to force Gnome or KDE to use X11. libinput currently assumes the touchscreen(s) covers all available monitors.
Touchegg is a multitouch gesture program, only compatible with X, that runs as a user in the background, recognizes gestures, and translates them to more conventional events such as mouse wheel movements, so that you can for example use two fingers to scroll. But it also interferes with applications or window managers which already do their own gesture recognition. If you have both a touchpad and a touchscreen, and if the touchpad driver (such as synaptics or libinput) has been configured not to recognize gestures itself, but to pass through the multi-touch events, then Touchegg will recognize gestures on both: this cannot be configured. In fact it does a better job of recognizing gestures than either the synaptics or libinput touchpad drivers; but on the touchscreen, it is generally better for applications to respond to touch in their own unique ways. Some Qt and GTK applications do that, but they will not be able to if you have Touchegg "eating" the touch events. So, Touchegg is useful when you are running mainly legacy applications which do not make their own use of touch events.

The displays in the current mass production have some induced EMI from the LCD to the touchscreen, and I have found that the hardware pen down/up detection in the AFE is very sensible to spikes coming into the touch foils. The touch is not usable in 80% of all devices.
So I have rewritten the touchscreen driver to avoid the hardware pen detection and do that in software. IMO the hardware pen detection should not be used in production devices.
Support for newer AMD graphics hardware is provided by the xserver-xorg-video-amdgpu package. This will officially cover any cards that are part of GCN 1.2 ("GCN 3rd generation") or newer. This generation consists of most chips released after June 2015. GCN 1.0 and GCN 1.1 cards (Manufactured January 2012 to June 2015) are supported experimentally and require extra kernel parameters to be set, as documented in the experimental section.
Proprietary, binary-only firmware (also known as microcode) is not allowed in the main Debian repository as per the Debian Free Software Guidelines. The firmware can be obtained by installing the firmware-amd-graphics package, as long as the non-free component is enabled in your SourcesList file. The installation instructions below this section will document adding this component and installing the necessary firmware.
The following procedure will install the open-source display driver packages, DRI modules (for 3D acceleration), and driver firmware/microcode. It installs the Xorg video driver metapackage which includes all drivers. Your system will automatically select which one to use on boot. If your card is supported by both AMDGPU and Radeon (such as the GCN 1.0/1.1 series), it will default to radeon. You can view instructions for using the newer driver here
Furthermore, if you are using an AMD A10 APU with an integrated Sea Island (GCN 1.1) card, you may have to disable Radeon Dynamic Power Management to get a proper boot. This is a feature that dynamically re-clocks the graphics core in order to keep the APU cooler and quieter, however for kernel versions 4.x.x and 5.x.x, this feature may put you in an infinite restart loop. To disable it, following the instructions above, add radeon.dpm=0 to the boot options.
It is possible that the driver and firmware manage the fans too poorly. amdgpu-fan is a tool that allows you to manage the fans of the graphics card to better control the temperature. Unfortunately this open-source tool is not available in the Debian repositories, you have to install it from python-pip3:sudo pip3 install amdgpu-fan
Debian Stretch and newer come with a Mesa version which supports DRI Offloading. Make sure all necessary drivers are installed. It also needs the firmware-amd-graphics package to be installed.
The above listing should give both the names of the cards and the associated drivers. Assuming you"re using a dedicated chip that uses the radeon and an integrated Intel card for example that"s using the intel driver, you may set:xrandr --setprovideroffloadsink radeon Intel

a line of extreme and ultra-narrow bezel LCD displays that provides a video wall solution for demanding requirements of 24x7 mission-critical applications and high ambient light environments
We have a 3m microtouch display. It"s connected to my Debian system via USB and recognized as human interface (hid). I am trying to access and push realtime information... if its getting touched I want to know where (x,y) and pipe it through netcat to another host.
As a workaround, is there, maybe, a solution where the X-Server could tell me? The touchscreen behaves like a mouse in X. I actually already tried to get x,y-position of the mouse via xlib. But it was too slow and wouldn"t tell me if somebody is touching or not...

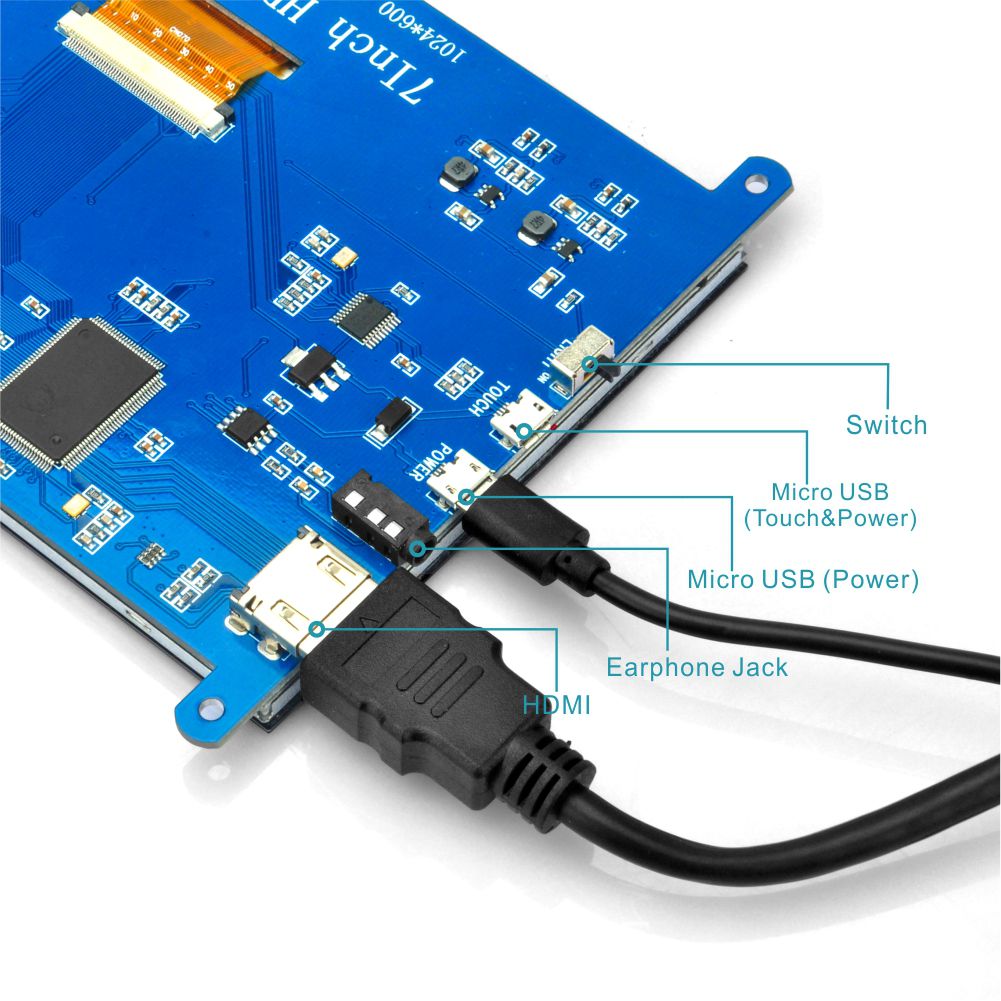
【Five-points Touch】Capacitive touch control and Five-points Touch. It has vertical and horizontal image flip function. Equipping with HDMI & Earphone Jack & 2x Micro USB port support. Connect the screen to other devices via the HDMI interface and power it via Micro USB.
【Widely Application】This touch display can be used for security monitors and other multi-purpose displays, network player boxes, raspberry pi, HD DVR, high-end instruments, extended laptop monitors.



 Ms.Josey
Ms.Josey 
 Ms.Josey
Ms.Josey