
lcd display pic microcontroller factory

16×2 Character LCD is a very basic LCD module which is commonly used in electronics projects and products. It contains 2 rows that can display 16 characters. Each character is displayed using 5×8 or 5×10 dot matrix. It can be easily interfaced with a microcontroller. In this tutorial we will see how to write data to an LCD with PIC Microcontroller using Hi-Tech C Compiler. Hi-Tech C has no built in LCD libraries so we require the hardware knowledge of LCD to control it. Commonly used LCD Displays uses HD44780 compliant controllers.
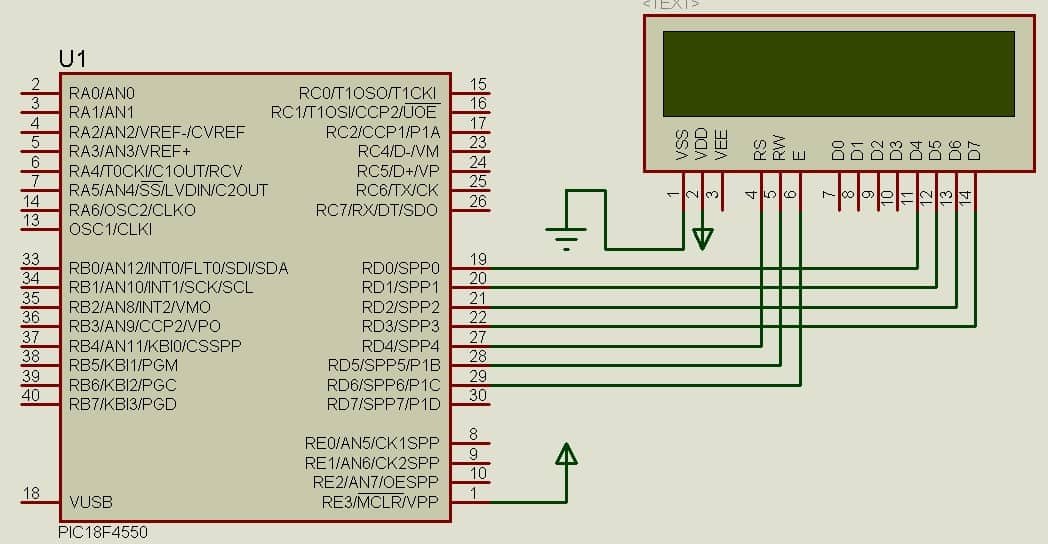
This is the pin diagram of a 16×2 Character LCD display. As in all devices it also has two inputs to give power Vcc and GND. Voltage at VEE determines the Contrast of the display. A 10K potentiometer whose fixed ends are connected to Vcc, GND and variable end is connected to VEE can be used to adjust contrast. A microcontroller needs to send two informations to operate this LCD module, Data and Commands. Data represents the ASCII value (8 bits) of the character to be displayed and Command determines the other operations of LCD such as position to be displayed. Data and Commands are send through the same data lines, which are multiplexed using the RS (Register Select) input of LCD. When it is HIGH, LCD takes it as data to be displayed and when it is LOW, LCD takes it as a command. Data Strobe is given using E (Enable) input of the LCD. When the E (Enable) is HIGH, LCD takes it as valid data or command. The input signal R/W (Read or Write) determines whether data is written to or read from the LCD. In normal cases we need only writing hence it is tied to GROUND in circuits shown below.
The interface between this LCD and Microcontroller can be 8 bit or 4 bit and the difference between them is in how the data or commands are send to LCD. In the 8 bit mode, 8 bit data and commands are send through the data lines DB0 – DB7 and data strobe is given through E input of the LCD. But 4 bit mode uses only 4 data lines. In this 8 bit data and commands are splitted into 2 parts (4 bits each) and are sent sequentially through data lines DB4 – DB7 with its own data strobe through E input. The idea of 4 bit communication is introduced to save pins of a microcontroller. You may think that 4 bit mode will be slower than 8 bit. But the speed difference is only minimal. As LCDs are slow speed devices, the tiny speed difference between these modes is not significant. Just remember that microcontroller is operating at high speed in the range of MHz and we are viewing LCD with our eyes. Due to Persistence of Vision of our eyes we will not even feel the speed difference.
Hope that you got rough idea about how this LCD Module works. Actually you need to read the datasheet of HD44780 LCD driver used in this LCD Module to write a Hi-Tech C program for PIC. But we solved this problem by creating a header file lcd.h which includes all the commonly used functions. Just include it and enjoy.
Lcd8_Init() & Lcd4_Init() : These functions will initialize the LCD Module connected to the following defined pins in 8 bit and 4 bit mode respectively.
Lcd8_Set_Cursor() & Lcd4_Set_Cursor() : These functions set the row and column of the cursor on the LCD Screen. By using this we can change the position of the character being displayed by the following functions.
Lcd8_Write_Char() & Lcd4_Write_Char() :These functions will write a character to the LCD Screen when interfaced through 8 Bit and 4 Bit mode respectively.
Lcd8_Shift_Left() & Lcd4_Shift_Left() : These functions are used to shift the content on the LCD Display left without changing the data in the display RAM.
Lcd8_Shift_Right() & Lcd4_Shift_Right() : Similar to above functions, these are used to shift the content on the LCD Display right without changing the data in the display RAM.

A PIC Microcontroller can be easily made to communicate with LCD by using the built in Libraries of MikroC. Interfacing between PIC and LCD can be 4-bit or 8-bit. The difference between 4-bit and 8-bit is how data are send to the LCD. In the 8-bit mode to write an 8-bit character to the LCD module, ASCII data is send through the data lines DB0- DB7 and data strobe is given through the E line.
But 4-bit mode uses only 4 data lines. In this mode the 8-bit ASCII data is divided into 2 parts which are send sequentially through data lines DB4 – DB7 with its own data strobe through the E line. The idea of 4-bit communication is to save as much pins that used to interface with LCD. The 4-bit communication is a bit slower when compared to 8-bit. The speed difference is only minimal, as LCDs are slow speed devices the tiny speed difference between these two modes is not significant. Thus the 4-bit mode data transmission is most commonly used.
The above definitions tells the compiler, how LCD is connected to the microcontroller. The two set of definitions are used to provide Data (PORT) and Direction (TRIS) registers.
This function prints the text (string) in the current cursor position. When we write data to LCD Screen, it automatically increments the cursor position.

This is our sixth tutorial in our PIC Tutorial Series, in this tutorial we learn Interfacing of 16x2 LCD with PIC Microcontroller. In our previous tutorials we have learnt the basics of PIC using some LED blinking Programs and have also learnt How to use Timers in PIC Microcontroller. You can check here all the tutorials on Learning PIC Microcontrollers using MPLABX and XC8 compiler.
This tutorial will be an interesting one because we will learn How to Interface 16×2 LCD with PIC16F877A, check the detailed Video at the end this tutorial. Gone are the old days where we used LEDs for user indications. Let us see how we can make our projects look more cool and useful by using LCD displays. Also check our previous articles on Interfacing LCD with 8051, with Arduino, with Raspberry Pi, with AVR.
To make things easier we have made a small librarythat could make things easy while using this LCD with our PIC16F877A. The header file "MyLCD.h" is given here for download, which contains all the necessary function to drive the LCD using PIC MCU. Library code is well explained by comment lines but if you still have doubts reach us through the comment section. Also check this article for Basic LCD working and its Pinouts.
Now, there are two ways to add this code into your program. You can either copy all the above lines of code in MyLCD.h and paste them before the void main(). Or you can download the header file using the link and add them to the header file of your project (#include " MyLCD.h ";). This can be done by right clicking on the header file and selecting Add existing Item and browsing to this header file.
Here I have copied and pasted the header file code into my main C file. So if you are using our code, then you don’t need to download and add the header file into your program, just use the complete Code given at the end of this Tutorial. Also note that this library will only support PIC16F series PIC Microcontroller.
void Lcd_Start():This function should be the first function that has to be called to start working with our LCD. We should call this function only once to avoid lag in the program.
void Lcd_Set_Cursor(x pos, y pos):Once started, our LCD is ready to take commands, we can instruct the LCD to set its cursor in you preferred location by using this function. Suppose if, we need out cursor at 5th character of 1st row. Then the function will be void Lcd_Set_Cursor(1, 5)
Each time the Lcd_Print_Char(char data)is called, its respective character values is sent to the data-lines of the LCD. These characters reach the HD44780U in form of bits. Now this IC relates the bits to the character to be displayed by using its ROM memory as shown the below table. You can find bits for all the characters in the datasheet of HD44780U LCD Controller.
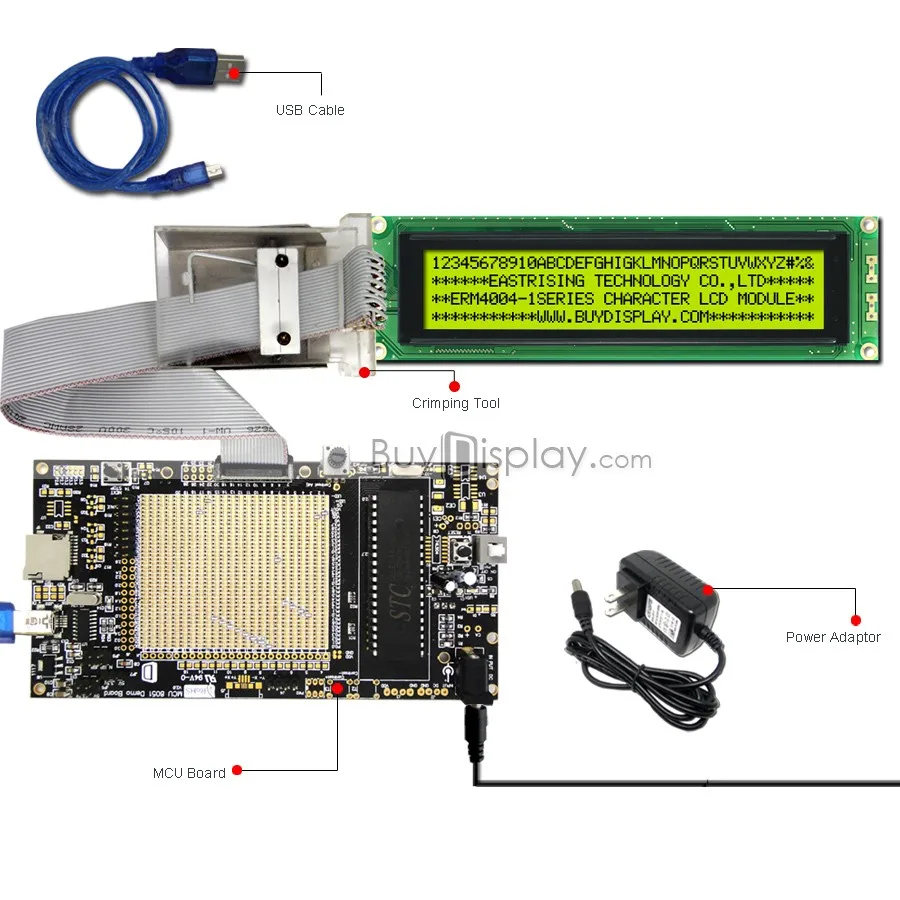
The hardware for this project is very simple. We are going to reuse the same PIC module that we used last time and connect the LCD module to our PIC using jumper wires.
Pic microcontroller projects are very popular among Electrical and electronics engineering students. PIC microcontrollers are family of microcontrollers designed by microchip. Pic microcontrollers used Harvard architecture. PIC microcontrollers are available in a wide range starting from 8-bit to 32-bit microcontrollers. Dspic microcontrollers are also very famous in the digital signal processing field. PIC16F family of pic microcontroller is very famous among engineering students and professionals. Pic microcontroller projects list is given below. PIC16F series of microcontrollers are used in almost all projects in this list. This list contains pic microcontroller projects based on PIC16, PIC18 and Dspic microcontrollers.
Every year many electrical and electronics engineering students are working on different pic microcontroller projects. Pic microcontrollers are very famous among engineering students. PIC microcontrollers are easy to use due to easy to use compiler Mikro C. In this article, I have listed the best pic microcontroller projects. These projects contain a complete circuit diagram, simulation, and programming. I tried to cover each and everything in these articles. If you want to include your project in this list, write in comments. I will love to share your project with others.
This project is about how to measure alternating voltage using PIC16F877A microcontroller. Two methods are discussed to measure voltage ; one is difference amplifier method and other one is using potential transformer.
In this project, digital temperature sensor is designed using LM35 temperature sensor and liquid crystal display. ADC is used to measure analog output of temperature sensor.
It can be used to measure frequency of square wave signals. Timers and external interrupts are configured to measure frequency. LCD displays this measured value.
It is used to convert dc voltage into ac voltage having a pure sine wave. Full H-Bridge is used as a converter. IR2110 mosfet driver drives the MOSFETs of H-Bridge. PIC16F877A is used to provide SPWM signals and to control switches.
PV panels provide dc voltage, dc current and energy at the output. This project measures solar energy along with voltage and current , displays its value on LCD.
ZCD circuits are used in power electronics circuit to make switching at zero crossing of sine wave to avoid switching losses. This pic microcontroller project detects the zero crossing and provide output in the form of pulse at output pin of PIC16F877A.
This device is used to measure dc voltage. It consists of voltage divider and analog to digital converter. Voltage divider circuit reduce the voltage below 5 volts and microcontroller measures this voltage.

The die from an Intel 8742, an 8-bit microcontroller that includes a CPU running at 12 MHz, 128 bytes of RAM, 2048 bytes of EPROM, and I/O in the same chip
A microcontroller (MCU for microcontroller unit) is a small computer on a single VLSI integrated circuit (IC) chip. A microcontroller contains one or more CPUs (processor cores) along with memory and programmable input/output peripherals. Program memory in the form of ferroelectric RAM, NOR flash or OTP ROM is also often included on chip, as well as a small amount of RAM. Microcontrollers are designed for embedded applications, in contrast to the microprocessors used in personal computers or other general purpose applications consisting of various discrete chips.
In modern terminology, a microcontroller is similar to, but less sophisticated than, a system on a chip (SoC). An SoC may connect the external microcontroller chips as the motherboard components, but an SoC usually integrates the advanced peripherals like graphics processing unit (GPU) and Wi-Fi interface controller as its internal microcontroller unit circuits.
Microcontrollers are used in automatically controlled products and devices, such as automobile engine control systems, implantable medical devices, remote controls, office machines, appliances, power tools, toys and other embedded systems. By reducing the size and cost compared to a design that uses a separate microprocessor, memory, and input/output devices, microcontrollers make it economical to digitally control even more devices and processes. Mixed signal microcontrollers are common, integrating analog components needed to control non-digital electronic systems. In the context of the internet of things, microcontrollers are an economical and popular means of data collection, sensing and actuating the physical world as edge devices.
Some microcontrollers may use four-bit words and operate at frequencies as low as 4 kHz for low power consumption (single-digit milliwatts or microwatts). They generally have the ability to retain functionality while waiting for an event such as a button press or other interrupt; power consumption while sleeping (CPU clock and most peripherals off) may be just nanowatts, making many of them well suited for long lasting battery applications. Other microcontrollers may serve performance-critical roles, where they may need to act more like a digital signal processor (DSP), with higher clock speeds and power consumption.
One book credits TI engineers Gary Boone and Michael Cochran with the successful creation of the first microcontroller in 1971. The result of their work was the TMS 1000, which became commercially available in 1974. It combined read-only memory, read/write memory, processor and clock on one chip and was targeted at embedded systems.
During the early-to-mid-1970s, Japanese electronics manufacturers began producing microcontrollers for automobiles, including 4-bit MCUs for in-car entertainment, automatic wipers, electronic locks, and dashboard, and 8-bit MCUs for engine control.
Partly in response to the existence of the single-chip TMS 1000,Intel 8048, with commercial parts first shipping in 1977.RAM and ROM on the same chip with a microprocessor. Among numerous applications, this chip would eventually find its way into over one billion PC keyboards. At that time Intel"s President, Luke J. Valenter, stated that the microcontroller was one of the most successful products in the company"s history, and he expanded the microcontroller division"s budget by over 25%.
Most microcontrollers at this time had concurrent variants. One had EPROM program memory, with a transparent quartz window in the lid of the package to allow it to be erased by exposure to ultraviolet light. These erasable chips were often used for prototyping. The other variant was either a mask programmed ROM or a PROM variant which was only programmable once. For the latter, sometimes the designation OTP was used, standing for "one-time programmable". In an OTP microcontroller, the PROM was usually of identical type as the EPROM, but the chip package had no quartz window; because there was no way to expose the EPROM to ultraviolet light, it could not be erased. Because the erasable versions required ceramic packages with quartz windows, they were significantly more expensive than the OTP versions, which could be made in lower-cost opaque plastic packages. For the erasable variants, quartz was required, instead of less expensive glass, for its transparency to ultraviolet light—to which glass is largely opaque—but the main cost differentiator was the ceramic package itself.
In 1993, the introduction of EEPROM memory allowed microcontrollers (beginning with the Microchip PIC16C84)EPROM, allowing both rapid prototyping, and in-system programming. (EEPROM technology had been available prior to this time,Flash memory, a special type of EEPROM.
A typical home in a developed country is likely to have only four general-purpose microprocessors but around three dozen microcontrollers. A typical mid-range automobile has about 30 microcontrollers. They can also be found in many electrical devices such as washing machines, microwave ovens, and telephones.
Historically, the 8-bit segment has dominated the MCU market [..] 16-bit microcontrollers became the largest volume MCU category in 2011, overtaking 8-bit devices for the first time that year [..] IC Insights believes the makeup of the MCU market will undergo substantial changes in the next five years with 32-bit devices steadily grabbing a greater share of sales and unit volumes. By 2017, 32-bit MCUs are expected to account for 55% of microcontroller sales [..] In terms of unit volumes, 32-bit MCUs are expected account for 38% of microcontroller shipments in 2017, while 16-bit devices will represent 34% of the total, and 4-/8-bit designs are forecast to be 28% of units sold that year.
Cost has plummeted over time, with the cheapest 8-bit microcontrollers being available for under US$0.03 in 2018,32-bit microcontrollers around US$1 for similar quantities.
In 2012, following a global crisis—a worst ever annual sales decline and recovery and average sales price year-over-year plunging 17%—the biggest reduction since the 1980s—the average price for a microcontroller was US$0.88 (US$0.69 for 4-/8-bit, US$0.59 for 16-bit, US$1.76 for 32-bit).
In 2018, 8-bit microcontrollers could be bought for US$0.03,US$0.393 (1,000 units, but at US$0.563 for 100 or US$0.349 for full reel of 2,000),US$0.503 (1,000 units, but at US$0.466 for 5,000).
In 2018, the low-priced microcontrollers above from 2015 were all more expensive (with inflation calculated between 2018 and 2015 prices for those specific units) at: the 8-bit microcontroller could be bought for US$0.319 (1,000 units) or 2.6% higher,US$0.464 (1,000 units) or 21% higher,US$0.503 (1,000 units, but at US$0.466 for 5,000) or 33% higher.
While some embedded systems are very sophisticated, many have minimal requirements for memory and program length, with no operating system, and low software complexity. Typical input and output devices include switches, relays, solenoids, LED"s, small or custom liquid-crystal displays, radio frequency devices, and sensors for data such as temperature, humidity, light level etc. Embedded systems usually have no keyboard, screen, disks, printers, or other recognizable I/O devices of a personal computer, and may lack human interaction devices of any kind.
Microcontrollers must provide real-time (predictable, though not necessarily fast) response to events in the embedded system they are controlling. When certain events occur, an interrupt system can signal the processor to suspend processing the current instruction sequence and to begin an interrupt service routine (ISR, or "interrupt handler") which will perform any processing required based on the source of the interrupt, before returning to the original instruction sequence. Possible interrupt sources are device dependent, and often include events such as an internal timer overflow, completing an analog to digital conversion, a logic level change on an input such as from a button being pressed, and data received on a communication link. Where power consumption is important as in battery devices, interrupts may also wake a microcontroller from a low-power sleep state where the processor is halted until required to do something by a peripheral event.
Typically micro-controller programs must fit in the available on-chip memory, since it would be costly to provide a system with external, expandable memory. Compilers and assemblers are used to convert both high-level and assembly language code into a compact machine code for storage in the micro-controller"s memory. Depending on the device, the program memory may be permanent, read-only memory that can only be programmed at the factory, or it may be field-alterable flash or erasable read-only memory.
Other versions may be available where the ROM is accessed as an external device rather than as internal memory, however these are becoming rare due to the widespread availability of cheap microcontroller programmers.
Microcontrollers usually contain from several to dozens of general purpose input/output pins (GPIO). GPIO pins are software configurable to either an input or an output state. When GPIO pins are configured to an input state, they are often used to read sensors or external signals. Configured to the output state, GPIO pins can drive external devices such as LEDs or motors, often indirectly, through external power electronics.
Many embedded systems need to read sensors that produce analog signals. This is the purpose of the analog-to-digital converter (ADC). Since processors are built to interpret and process digital data, i.e. 1s and 0s, they are not able to do anything with the analog signals that may be sent to it by a device. So the analog to digital converter is used to convert the incoming data into a form that the processor can recognize. A less common feature on some microcontrollers is a digital-to-analog converter (DAC) that allows the processor to output analog signals or voltage levels.
Die of a PIC12C508 8-bit, fully static, EEPROM/EPROM/ROM-based CMOS microcontroller manufactured by Microchip Technology using a 1200 nanometer process
Integrating the memory and other peripherals on a single chip and testing them as a unit increases the cost of that chip, but often results in decreased net cost of the embedded system as a whole. Even if the cost of a CPU that has integrated peripherals is slightly more than the cost of a CPU and external peripherals, having fewer chips typically allows a smaller and cheaper circuit board, and reduces the labor required to assemble and test the circuit board, in addition to tending to decrease the defect rate for the finished assembly.
Some microcontrollers use a Harvard architecture: separate memory buses for instructions and data, allowing accesses to take place concurrently. Where a Harvard architecture is used, instruction words for the processor may be a different bit size than the length of internal memory and registers; for example: 12-bit instructions used with 8-bit data registers.
The decision of which peripheral to integrate is often difficult. The microcontroller vendors often trade operating frequencies and system design flexibility against time-to-market requirements from their customers and overall lower system cost. Manufacturers have to balance the need to minimize the chip size against additional functionality.
Microcontroller architectures vary widely. Some designs include general-purpose microprocessor cores, with one or more ROM, RAM, or I/O functions integrated onto the package. Other designs are purpose built for control applications. A micro-controller instruction set usually has many instructions intended for bit manipulation (bit-wise operations) to make control programs more compact.
Microcontrollers traditionally do not have a math coprocessor, so floating-point arithmetic is performed by software. However, some recent designs do include an FPU and DSP optimized features. An example would be Microchip"s PIC32 MIPS based line.
Microcontrollers were originally programmed only in assembly language, but various high-level programming languages, such as C, Python and JavaScript, are now also in common use to target microcontrollers and embedded systems.Compilers for general purpose languages will typically have some restrictions as well as enhancements to better support the unique characteristics of microcontrollers. Some microcontrollers have environments to aid developing certain types of applications. Microcontroller vendors often make tools freely available to make it easier to adopt their hardware.
Microcontrollers with specialty hardware may require their own non-standard dialects of C, such as SDCC for the 8051, which prevent using standard tools (such as code libraries or static analysis tools) even for code unrelated to hardware features. Interpreters may also contain nonstandard features, such as MicroPython, although a fork, CircuitPython, has looked to move hardware dependencies to libraries and have the language adhere to a more CPython standard.
Interpreter firmware is also available for some microcontrollers. For example, BASIC on the early microcontrollers Intel 8052;FORTH on the Zilog Z8interactive programming.
Simulators are available for some microcontrollers. These allow a developer to analyze what the behavior of the microcontroller and their program should be if they were using the actual part. A simulator will show the internal processor state and also that of the outputs, as well as allowing input signals to be generated. While on the one hand most simulators will be limited from being unable to simulate much other hardware in a system, they can exercise conditions that may otherwise be hard to reproduce at will in the physical implementation, and can be the quickest way to debug and analyze problems.
Recent microcontrollers are often integrated with on-chip debug circuitry that when accessed by an in-circuit emulator (ICE) via JTAG, allow debugging of the firmware with a debugger. A real-time ICE may allow viewing and/or manipulating of internal states while running. A tracing ICE can record executed program and MCU states before/after a trigger point.
Many others exist, some of which are used in very narrow range of applications or are more like applications processors than microcontrollers. The microcontroller market is extremely fragmented, with numerous vendors, technologies, and markets. Note that many vendors sell or have sold multiple architectures.
In contrast to general-purpose computers, microcontrollers used in embedded systems often seek to optimize interrupt latency over instruction throughput. Issues include both reducing the latency, and making it be more predictable (to support real-time control).
Cycles needed to complete current CPU activities. To minimize those costs, microcontrollers tend to have short pipelines (often three instructions or less), small write buffers, and ensure that longer instructions are continuable or restartable. RISC design principles ensure that most instructions take the same number of cycles, helping avoid the need for most such continuation/restart logic.
Interrupt nesting. Some microcontrollers allow higher priority interrupts to interrupt lower priority ones. This allows software to manage latency by giving time-critical interrupts higher priority (and thus lower and more predictable latency) than less-critical ones.
Two different kinds of memory are commonly used with microcontrollers, a non-volatile memory for storing firmware and a read-write memory for temporary data.
From the earliest microcontrollers to today, six-transistor SRAM is almost always used as the read/write working memory, with a few more transistors per bit used in the register file.
In addition to the SRAM, some microcontrollers also have internal EEPROM for data storage; and even ones that do not have any (or not enough) are often connected to external EEPROM chip (such as the BASIC Stamp) or external flash memory chip.
The earliest microcontrollers used mask ROM to store firmware. Later microcontrollers (such as the early versions of the Freescale 68HC11 and early PIC microcontrollers) had EPROM memory, which used a translucent window to allow erasure via UV light, while production versions had no such window, being OTP (one-time-programmable). Firmware updates were equivalent to replacing the microcontroller itself, thus many products were not upgradeable.
Motorola MC68HC805EEPROM to store the firmware. EEPROM microcontrollers became more popular in 1993 when Microchip introduced PIC16C848051-core microcontroller that was first one to use NOR Flash memory to store the firmware.
"MCU Market on Migration Path to 32-bit and ARM-based Devices". April 25, 2013. It typically takes a global economic recession to upset the diverse MCU marketplace, and that’s exactly what occurred in 2009, when the microcontroller business suffered its worst-ever annual sales decline of 22% to $11.1 billion.
Edwards, Robert (1987). "Optimizing the Zilog Z8 Forth Microcontroller for Rapid Prototyping" (PDF). Martin Marietta: 3. Retrieved 9 December 2012. Cite journal requires |journal= (help)

Now, in the world of electronics, the term MCU has a very different meaning. It’s an acronym for the microcontroller unit. In an embedded system, the MCU is the core component that makes up the circuit. There is a great deal of knowledge about using an MCU but here is some brief info to get you started.
For example, a temperature display controller links a temperature sensor and an LCD display to the MCU. The MCU will sample the temperature value as an analog input and convert it to a digital value. The digital value is then displayed by sending the right command logic to the LCD.
You’ll want to consider the complexity of the application. If a design involves a simple timer activated output, a simple microcontroller with 1kB flash and a single port of I/O will suffice. However, if the design involves complicated logic such as a WIFI-based facial recognition device, you’ll need a 32-bit high-end MCU.

A lot goes into the design of quality electronics regardless of the intended application. Akey componentof embedded systems in electronics is the microcontroller. While diverse, an electronic designer needs to settle for a microcontroller type that suits their electronic needs. PIC microcontrollers are one such type.
PIC microcontrollersare programmable and the world’s tiniest. It is capable of carrying out a diverse task range. Therefore, you will find them in alarm systems, computer control systems, phones, alarm systems, etc. Understanding the diverse types of PIC microcontrollers informs the design process and programming of PIC microcontrollers. Want to learn more? Continue reading.
PIC microcontrollers, alternatively inferred asprogrammable interface controllers, came to the fore in 1993. Primarily designed and developed to support PDP computers in controlling their auxiliary devices, it currently has an expanded scope.
The PIC microcontrollers are based on Harvard architecture, which makes them popular. It stems from the ease in which it can get programmed,low cost, wide availability, and a simple interfacing capability with other auxiliary components. Additionally, it possesses a huge user base besides capacity for serial programming.
As anintegrated chip, a PIC microcontroller consists of a ROM, RAM, timers, CPU, and counters that support protocols like CAN, UART, and SPI for interfacing purposes. It also has flash memory, I/O ports, EEPROM, UART, SSP, ADC, and PSP besides ICSPand LCD. Such components form a fundamental aspect of the PIC microcontroller architecture.
The architecture of the PIC microcontroller defines its functionality. Besides considering the four classifications of the PIC microcontroller that rely on the internal architecture, understanding the different PIC microcontrollers’ types becomes ideal before the design process. Classifications include baseline PIC, enhanced mid-range PIC, mid-range PIC, and PIC18.
PIC microcontrollers also need programming to tailor them to their specific applications. As a designer, you need to factor in the PIC microcontroller programming software to deploy before development. It allows for its proper functioning upon completion. In most instances, the typical programming language often features the embedded C language. Let us now look into the architecture and programming process of the PIC microcontroller.
It only becomes possible to design and program a PIC microcontroller after understanding its architecture. The architecture entails I/O ports, CPU, A/D converter, interrupts, oscillator, counters/timers, memory organization CPP module, and serial communication.
It is similar to other microcontroller CPUs. It has a CU, AC, ALU, accumulator, and MU, among other components. Every aspect has its use. For instance, a control unit (CU) controls everything connected to the CPU. An arithmeticlogic unit (ALU) carries out arithmetic operations besides undertaking logical decisions. A memory unit (MU) stores instructions, etc.
The MU or memory organization module consists of ROM, RAM, and STACK. RAM comes unstable and stores data momentarily in its registers. RAM registers get classified either as general-purpose (GPR) or special function registers (SFR). On the other hand, ROM stores data permanently and, for a microcontroller case, the program. It all functions through the execution of instructions by the CPU. EEPROM allows for programming of the ROM numerous times instead of what happens in a typicalread-only memory (ROM). Flash memory is also PROM and thus can write, read, and erase programs multiple times. Lastly, STACK stores and executes the information from the completion of the interrupt execution.
All PIC16 contain five ports, including Port A, B, C, D, and E. Port A is a 16-bit port for output and input based on the TRISA register. The next is Port B, which comes as an 8-bit port for output or input functions, while Port C is similar to Port B but with its operation specified by the TRISC register. Port D acts as the slave port for Bus connection, while Port E comes as a 3-bit port that controls the digital or analog converter signals.
PIC microcontrollers have four counters/timers, whereas the 8-bit timer or the rest can accommodate eight or sixteen-bit mode, depending on your choice. It generates accuracy actions such as particular time delays among two operations.
PIC microcontrollers always require a PIC programmer, especially when building a PIC microcontroller project. Programming comes by way of an embedded C language, and as such, a designer needs to familiarizing with all these aspects before building their PIC controller project. But what does it all entail?
Before getting started on the PIC microcontroller programming front, it is crucial to understand how a standard microcontroller gets developed. However, the underlying considerations entail picking an ideal project for the microcontroller program, such as an LED flash system. Designing the circuit also becomes vital. Here, aspects such as circuit components, diagrams, and connections come into consideration.
The programming of PIC microcontrollers often gets carried out through the “MP-Lab” software. It requires installation before proceeding to install the compiler. Compilers include GCC compiler, CCS compiler, etc. After completion of the installation process, all you need is to follow the process below.
Pick a suitable compiler based on your needs besides your project’s location path. You can pick the CCS or the GCC compiler depending on your PIC microcontroller needs. After that, choose the browse option then the “ccsloader” within the PICC folder from the program files. At this point, a source group folder gets created in the intended folder.
At this stage, it becomes vital to assign the appropriate name to your project before clicking “Next” to save the project. Within the target folder, a source group folder gets created, which you select the file menu and pick the new file from the drop-down list.
After coming up with the PIC microcontroller code, you have to load it into the microcontroller in a process inferred as dumping. Microcontrollers solely comprehend the machine-level language featuring 0’s and 1’s. As such, the dumping process requires specific code loading software.
It is crucial to select and install your preferred software program from many options in the market. Additionally, the PIC programmer kit will come complete with a hardware kit. Plug the PIC microcontroller into the hardware kit and follow the process below to dump the code into the PIC microcontroller.
Plenty of PIC microcontrollers exist in the market. It is, therefore, always difficult to settle on the correct PIC microcontroller type and size when talking to your PCB or circuit assembly company. However, based on your need, we at RayMing PCB and Assembly will advise you accordingly. What’s more? You will get top-rate quality assembly services for your PIC microcontroller at reasonable prices.
The PIC16f877a/PIC16f877 has a simple programming process besides convenience when it comes to using. Because of this, it proves a popular microcontroller option within the industry. It comes either 8-bit or 16-bit and has a flash memory tech allowing for numerous write-erase processes. While ideal because the total amount of pins (40 in total and 33 for output and input) mainly applies in digital electronic circuits and PIC microcontroller projects. It is instrumental in home automation devices and systems, industrial instruments, remote sensors, and safety and security devices.
It comes as an 8-bit CMOS microcontroller developed on high-performance RISC architecture. The PIC12f675 is small in size and cost-effective, thus proves popular among engineers and hobbyists. The design is perfect for low-end systems and applications because of its 2Kbytesflash memory. It also contains 6 GPIO pins that can handle not more than 25mA of current, meeting the threshold of many sensors and peripheral devices.
It is a renowned and the most utilized PIC microcontroller type based on its pioneering stature. The PIC16f84 comes as an 8-bit mid-range microcontroller with a 1024 word program memory. It also has a RAM of 68bytes and a lasting EPROM storage of 64bytes. The striking factor about PIC 16f84 is that it can get reprogrammed using thein-circuit ICSP.
It is an 8-bit flash-based CMOS microcontroller that is simple to program. The PIC microcontroller packs the powerful PIC® MCU architecture within the 8-pin package. It has various features that make it popular, such as the one-channel comparator besides the 128byte EEPROM. It is ideal for application in industrial, automotive, and consumer electronics.
It is a powerful and simple-to-program PIC microcontroller that is based on the CMOS flash-based 8-bit PIC microcontroller. Additionally, it packs the PIC® architecture within the 28-pin package. PIC16f886 possesses a 256byte EEPROM, is self-programming, and has two comparators, among other vital features. It makes it a popular choice for applications in sectors like industrial, automotive, consumer and appliances.
The popular PIC microcontroller mainly gets deployed in embeddedand automation systems. It comes as either TQFP, PDIP, or QFN. The PDIP has 40 pins, while the rest contains a 44-pin interface. It contains a 10-bit ADC, a 256byte EEPROM data memory, and a RAM of 1536 bytes.
It comes as a popular 8-bit PIC microcontroller and comes with an improved NanoWatt technology and flash processor. The PIC microcontroller has three distinctive packages in SSOP, PDIP, and QFN. The SSOP has a 20 pin package, while the PDIP and QFN have 18 pin and 28 pin packages, respectively.
It is a powerful and simple-to-program CMOS and flash-based 8-bit PIC microcontroller. The PIC16f676 packs the powerful PIC® MCU architecture within the 14-pin package. It is a 10-bit A/D converter complete with eight channels, a single comparator, besides an EEPROM data memory. It has applications in industrial, automotive, consumer, and appliance entry-level products, especially those requiring field re-programmability.
The 8-pin flash-based CMOS PIC microcontroller comes with a nanoWatt tech. It offers benefits associated with the mid-range x14 architecture, including standardized features. Such features make it a popular PIC microcontroller option for automotive and industrial applications.
The popular and powerful PIC microcontroller comes as an 8-bit CMPS FLASH-based microcontroller type. It contains 34 I/O pins and comes with one 16-bit and 8-bit timer, 10-bit A/D converter, SPI, I2C, and USART peripherals.
It is a popular and relatively new PIC microcontroller type that cannot work on older device models. The PIC16f628 is based on the FLASH program memory of 3.5, 2 comparators, and a single CCP. What makes it an excellent option entails low voltage programming, programmable BOR, on-chip voltage reference, and other features.
The 8-bit PIC microcontroller from Microchip comes with a 20-pin interface. It incorporates the high-performance RISC CPU that assists in the execution of instructions. The microprocessor also has a crystal oscillator of 20MHz for interfacing purposes and the creation of clock pulses.
The popular PIC microcontroller comes with a FLASH memory of 32KB and proves compatible with PIC17 and PIC16 instruction sets. It uses advanced CAN technology and applies to the automotive and industrial sectors.
The PIC microcontroller comes optimized and equipped with the RISC architecture. It operates on flash memory and has a CPU speed of 10 DMIPS/MIPS, making it a toast for some people. Its maximum ADC is 10 bits with a CCP of 1.
The popular PIC microcontroller comes as a high-performance, low-cost, and 8-bit static microcontroller. It uses flash CMO technology with a total of 8 pins. It also possesses a DRT (device reset timer) that eliminates any requirement for external reset circuitry.
It is always vital to understand everything about PIC microcontrollers, including the diverse types, program them, etc. Such information becomes useful in designing integrated circuits and electronics as a whole. Therefore, consider all insights about the intricacies of the diverse PIC microcontrollers to stay ahead of your design game.
Learning embedded C can be hugely rewarding and creative. The tool chain needed to get you started is either free (MPXLAB IDE and XC8 C compiler are both free downloads from the Microchip website and the pickit 3 needed to download compiled C code to your target microcontroller (16f690 in this case) is less than 50GBP.
Here is the rear of the prototype which shows how simple the circuit really is – just a Microchip PIC 16f690, an LM35 temperature sensor which generates 10mV/ degree Centigrade, a contrast potentiometer for the LCD, and two push buttons to set hours and minutes of the clock.
And here is the C source code for the clock thermometer project, which has been complied with the free Microchip XC8 C complier and downloaded to the 16f690 with Microchip MPLABX IDE. Feel free to copy and use/ enhance this code to learn more about the C language and the PIC range of Microcontrollers, as I did and am still doing



 Ms.Josey
Ms.Josey 
 Ms.Josey
Ms.Josey