
using a tft lcd to move a servo arduino uno price

I can do the soldering if I have to. I also agree that the TFT should be mounted on the Mega. I can hardwire this shield and mount it remotely if I need to.
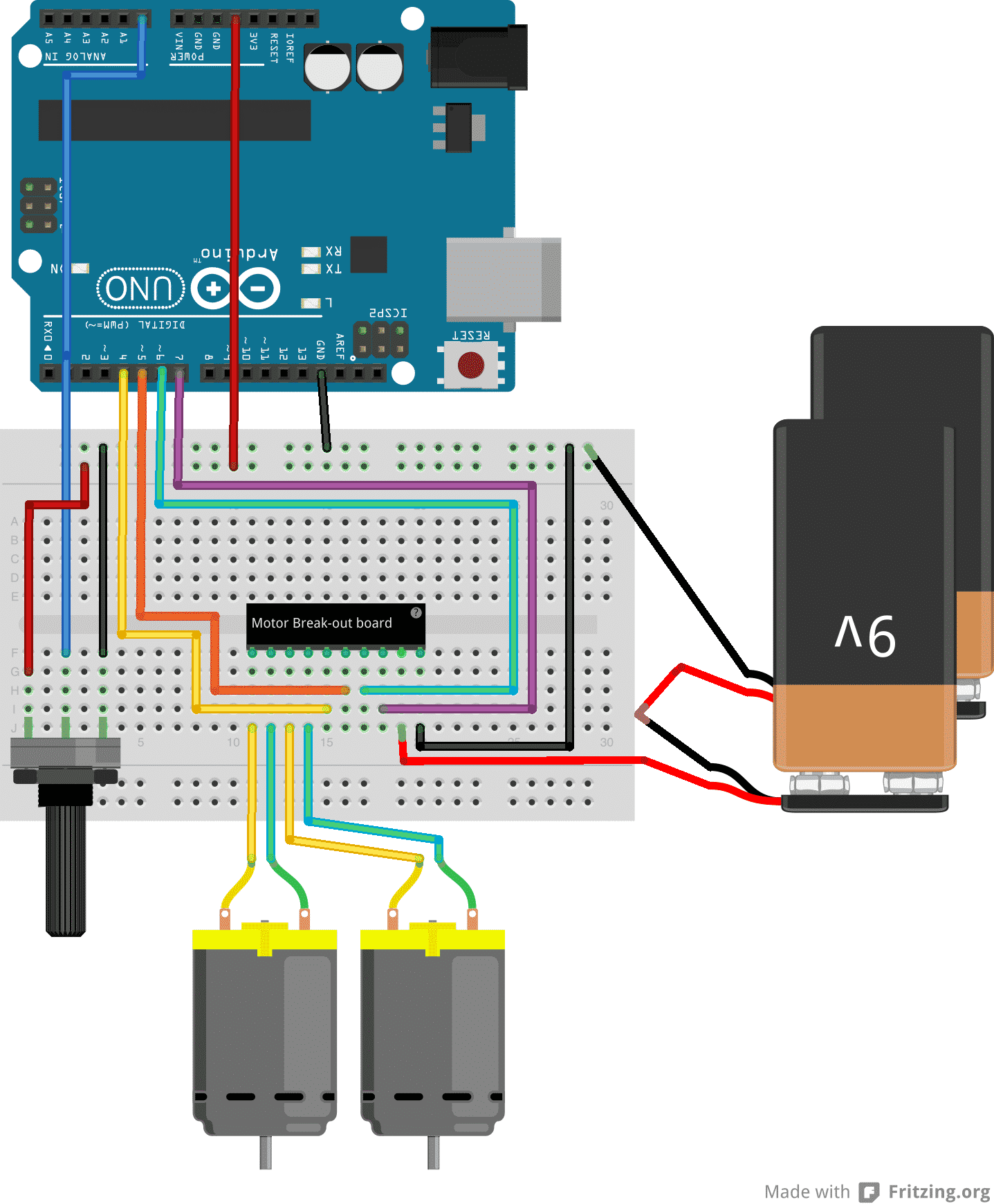
I have connected the motor shield to the Mega and confirmed correct operation of a piece of example code and then manually connected all the digital pins except 13. I also connected +5V and 0V for power and it sort of works but not correctly. just vibrates the stepper motor and moves a little bit where it should do a full revolution as part of the test code.

This website is using a security service to protect itself from online attacks. The action you just performed triggered the security solution. There are several actions that could trigger this block including submitting a certain word or phrase, a SQL command or malformed data.
This website is using a security service to protect itself from online attacks. The action you just performed triggered the security solution. There are several actions that could trigger this block including submitting a certain word or phrase, a SQL command or malformed data.

[Since this was originally posted I’ve come up with a low-noise, low-profile side mounting method. The mounting method does not change the programming required to control one, or more, servos.]
The first thing I do is prepare the servo by setting the position of the shaft to 90 degrees, the midpoint of its 180 degree total travel. I do this by attaching the servo to an Arduino Unoand uploading this little sketch once to set the servo (for those who don’t know, “//” signifies the start of a comment ):
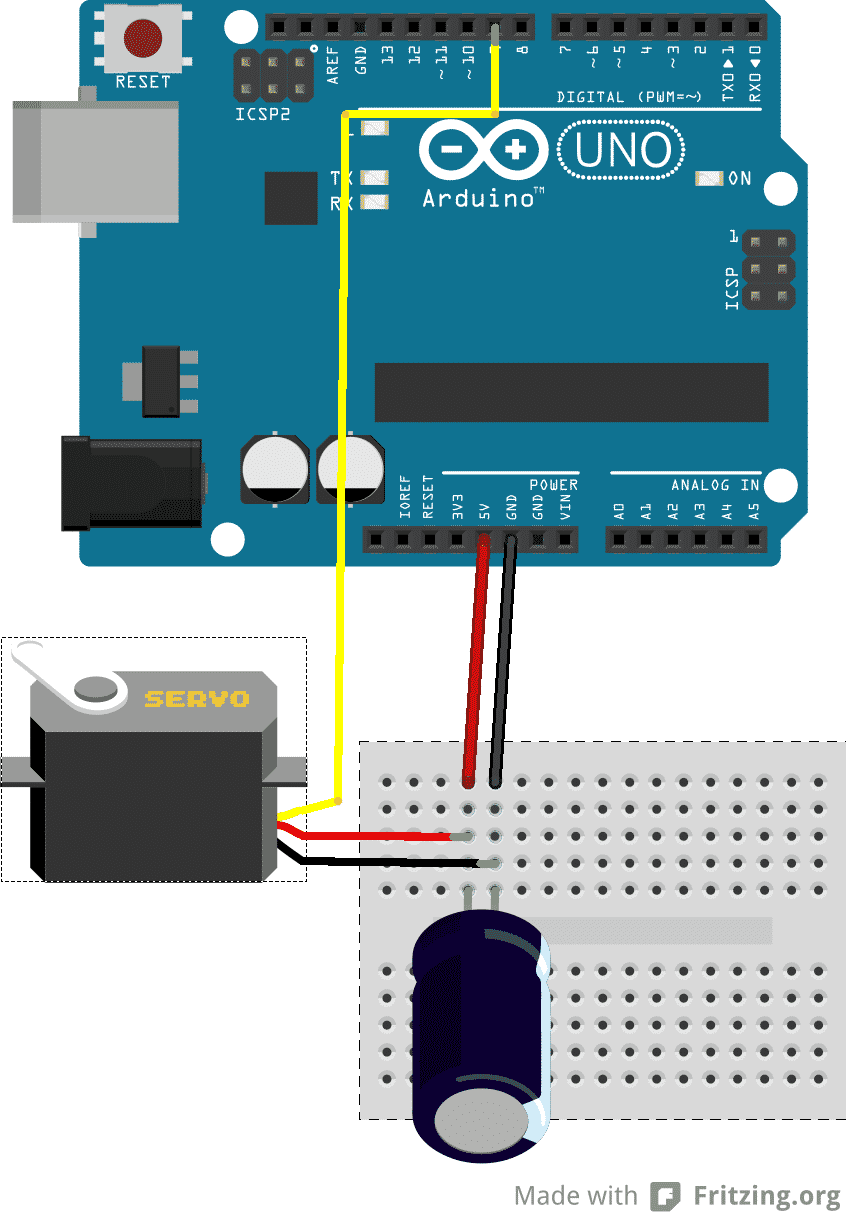
Here is the basic circuit for controlling a servo with an Arduino Uno, where the servo draws power from the Arduino. Servos can be independently powered, in which case only the signal wire and ground are connected to the Arduino.
The Arduino can Source a maximum of 200 mA current, and can Sink a maximum of 400 mA current. As you connect and try to run more devices, you’ll get to those limits quickly. In Model Railroad applications, given that we’re already routing track power, routing a few amps of +5 volt power to supply actuators like servos is a no-brainer for performance and system integrity. Whenever you use a separate power supply, the servo ground has to connect to both the power supply ground and the Arduino ground.
I fabricate a simple mounting bracket with a small plywood plate and a couple of blocks. Now I mount the servo in the bracket, place the horn onto the shaft in the position shown and then screw it down to the shaft.
Using a 1/16″ bit, I drill out a hole in the horn (usually the second hole from the end of the horn) and a hole in the turnout actuator bar. Don’t over ream the holes; the soft, slightly flexible plastic will provide a snug fit so you don’t have to use adhesives. Then, I slide a piece of 1/16″ brass rod through the horn to establish the location for a hole in the mounting plate.
I mark and drill the hole in the base plate. I rock the bit along the axis the rod will move (left to right in the view below) to slightly elongate it, and give it a more hour-glass profile. This hole functions as a fulcrum for the rod.
I mount the servo below the turnout. For this demonstration, I used hot glue to mount the bracket to the underside of the demonstration layout segment; screws are a better idea for most situations, allowing you to build in some adjustability. With the turnout set in the straight-through position, I carefully thread the rod through the turnout actuator bar, down through a prepared hole in the layout to the hole in the mounting plate and then the servo horn. The brass rod is perpendicular to the horn at the 90 degree setting. Moving the servo horn tilts the rod, moving the turnout above to its divergent position.
At this point I test the servo and make any adjustments necessary for smooth operation. When I’m satisfied everything is right, I trim the rod to its final size.
I’m planning to try music wire instead brass rod in the near future. The problem with brass rod is that it is stiff, and the servo can get fussy at the end of movement ranges because there is no give. Music wire is like spring wire and should allow me to apply pressure at the ends of movement ranges without overtaxing the servo. I’ll update this page with the results of those tests.
The button takes power from the +5v board supply and, when the button is pushed, routes the power to a designated pin, putting the pin in a HIGH state. On the output side of the button a pull-down resistor routes stray power to ground to guarantee that the pin is in a LOW state whenever the button is not pushed.
Here is a simple sketch to control a servo and have it move over about 2 seconds every time a button is pressed. The straight position is always 90 degrees because of the way I install the servo. The divergent angle depends on how the servo was installed in relation to the turnout– it will either be a larger angle in the 110 – 120 degree range, or a smaller angle in the 60-70 degree range. With practice and consistent placement of servos, they can all be the same; but if not, storing unique settings for each servo is not difficult.
Finally, we can add one more refinement and have the Arduino feedback position status via two pins that we can use to power leds at the control panel. The circuit looks like this:
To control multiple servos with one Arduino, your sketch would need variables for each servo to hold its pin id and unique divergent angle. More advanced programmers will want to create something like an array of data structures to organize pertinent data about the servos.
NOTE: The delay() function is used a lot in small demonstration sketches to control timing. The problem with delay is that it throws the board into a do-nothing state that prevents anything else from happening. In more complex sketches it is often advisable to avoid delay() and use other methods to meter actions across multiple controller cycles. In this case, be aware that the board is tied up while the servo is in motion.

Let’s take a look into a simple interfacing project this time. This is actuator interfacing with Arduino Uno and the actuator being servo motor, specifically SG90 servo motor. SG90 is a lightweight (just 9g) and tiny servo motor which has quite good output toque. We can use Arduino IDE to code this servo and control its movements precisely. We can rotate 180 with this servo motor.
This project uses SG90 servo motor interfaced with Arduino Uno which is programed to turn the servo motor from 0 degrees to 180 degrees and back to 0 degrees.
For demo purposes, with zero load on the servo motor, we are powering the servo motor using Arduino 5V pin. But it is important to keep in mind that the motor should be powered separately. This servo motor has input voltage of 4.8V to 6V DC. It is recommended that the servo motor should be powered externally (using a dedicated power supply) and the voltage should be within the accepted range. The maximum current draw from Arduino is 0.8A only. So when we use an external power supply, it will make sure that the Arduino board won’t be damaged due to excess current draw.
There is a common problem when dealing with SG90 (or even MG90S) that is the overshooting or undershooting. This is a problem has a bit to do with Control Systems. In general, we can say, the systems that are overdamped miss the target value, that causes the “undershoot”. This means, the servo would not really reach 0 to 180 degrees or other specified value. Whereas those systems that are underdamped go over the target. This causes the situation to “overshoot”. This is when the servo motor exceeds the specified degree and sweeps more area than it is supposed to do.
There are a couple of fixes available online for this overshoot/undershoot problem. You could use a better servo motor like “Tower pro MG 995” servos. This is not a micro servo like SG90 but it is more precise and it can also deliver more power. There are other servo motors that are used for model aircraft building; they are known to be more precise. They give very good results but are quite expensive. If you really want to use SG90 servo motor only and get precise degree turn, then, consider the following points to get better results:
The circuit connections for this project are very simple as the servo motor has only 3 pins. The red wire of the servo goes to 5V pin of Arduino Uno. The Black wire of the servo goes to Arduino Uno’s ground pin (GND). And the yellow wire (called the control pin of servo) goes to Arduino pin 8. This completes the circuit connections of the servo motor with Arduino Uno.
First, we need to include a library called “Servo.h” to be able to control various servo motors. If you don’t already have this library in your Arduino IDE, then you can go to “tools” à “Manage Libraries…” and type “Servo” in the Library Manager and install the one from “Michael Margolis, Arduino”.
Next, we declare a variable called “servo”. In void setup function, we use the servo.attach function to tell the Arduino board that the control pin of the servo motor is attached to pin 8 of Arduino (the function attaches the servo variable to the pin). The servo.write function is used to tell the servo the degree to which it should turn. At the beginning the default state of servo is considered as zero degree we keep this as origin position that is zero degrees. So we write servo.write(0). Then a delay function is used to create a delay of 2ms.
Next, in void loop, we use the servo.write function again to tell the servo to turn to 180 degrees and the delay function will hold this position for 1ms. Then the servo is instructed again to go back to 0 degrees, as we had initialized before. The delay function will hold this position for 1ms. This is repeated until the power is disconnected or servo is disconnected.
This is a beginner friendly project. It focuses on controlling an actuator, SG90 Servo motor, using Arduino Uno and Arduino IDE. It provides a strong basic foundation in dealing with actuators and helps beginners jump into more fun with actuators.

A joystick is an input device consisting of a stick that pivots on a base and reports its angle or direction to the device it is controlling. The Joystick Module is a tiny low cost option to add a game like control to your projects. Be it robotics or any other project that requires a precise human control. The module has two potentiometers for the X and Y axis measurements. Also a switch that can give an additional control option.

This website is using a security service to protect itself from online attacks. The action you just performed triggered the security solution. There are several actions that could trigger this block including submitting a certain word or phrase, a SQL command or malformed data.

This website is using a security service to protect itself from online attacks. The action you just performed triggered the security solution. There are several actions that could trigger this block including submitting a certain word or phrase, a SQL command or malformed data.

Arduino has a built-in function servo.write(degrees) that simplifies the control of servos. However, not all servos respect the same timings for all positions. Usually, 1 millisecond means 0 degrees, 1.5 milliseconds mean 90 degrees, and, of course, 2 milliseconds mean 180 degrees. Some servos have smaller or larger ranges.
For better control, we can use the servo.writeMicroseconds(us) function, which takes the exact number of microseconds as a parameter. Remember, 1 millisecond equals 1,000 microseconds.
In order to use more than one servo, we need to declare multiple servo objects, attach different pins to each one, and address each servo individually. First, we need to declare the servo objects—as many as we need:// Create servo objects
Connection-wise, the grounds from the servos go to GND on the Arduino, the servo power to 5V or VIN (depending on the power input), and in the end, each signal line has to be connected to a different digital pin. Contrary to popular belief, servos don"t need to be controlled by PWM pins—any digital pin will work.
There is a special breed of servos labelled as continuous rotation servos. While a normal servo goes to a specific position depending on the input signal, a continuous rotation servo either rotates clockwise or counter-clockwise at a speed proportional to the signal. For example, the Servo1.write(0) function will make the servomotor spin counter-clockwise at full speed. The Servo1.write(90) function will stop the motor and Servo1.write(180) will turn the motor clockwise at full speed.
There are multiple uses for such servos; however, they are really slow. If you are building a microwave and need a motor to turn the food, this is your choice. But be careful, microwaves are dangerous!

Today I’ll show how you can control a servo with Visual basic. Before this project I’ve never used Visual basic so if anyone finds any mistake in my code please leave a comment here and help me improve it.
I’ve always used the Serial Monitor of the Arduino IDE to communicate with the Arduino, but today we will use a visual basic program that I’ve created. Basically in the VB program we have 4 buttons that will interact with the Arduino when we press them.
I’ll be showing program in Visual Basic that allows the user to rotate a servo attached to the Arduino. You need to make 3 connections from the servo to your arduino:
Thanks for reading, you can contact me by leaving a comment. If you like this post probably you might like my next ones, so please support me by subscribing my blog and my Facebook Page.

This library enables you to use ISR-based PWM channels on AVR ATmega164, ATmega324, ATmega644, ATmega1284 with MCUdude MightyCore, to create and output PWM any GPIO pin
Minimal bit-bang send serial 115200 or 38400 baud for 1 MHz or 230400 baud for 8/16 MHz ATtiny clock.Perfect for debugging purposes.Code size is only 76 bytes@38400 baud or 196 bytes@115200 baud (including first call)
This library enables you to use Hardware-based PWM channels on Arduino AVR ATtiny-based boards (ATtiny3217, etc.), using megaTinyCore, to create and output PWM to pins.
This library enables you to use ISR-based PWM channels on Arduino AVR ATtiny-based boards (ATtiny3217, etc.), using megaTinyCore, to create and output PWM any GPIO pin.
Small low-level classes and functions for Arduino: incrementMod(), decToBcd(). strcmp_PP(), PrintStr, PrintStrN, printPad{N}To(), printIntAsFloat(), TimingStats, formUrlEncode(), FCString, KString, hashDjb2(), binarySearch(), linearSearch(), isSorted(), reverse(), and so on.
Cyclic Redundancy Check (CRC) algorithms (crc8, crc16ccitt, crc32) programmatically converted from C99 code generated by pycrc (https://pycrc.org) to Arduino C++ using namespaces and PROGMEM flash memory.
Write decimal numbers, hex numbers, temperature, clock digits, characters, and strings to the seven segment LED modules supported by the AceSegment library.
Various sorting algorithms for Arduino, including Bubble Sort, Insertion Sort, Selection Sort, Shell Sort (3 versions), Comb Sort (4 versions), Quick Sort (3 versions).
Date, time, timezone classes for Arduino supporting the full IANA TZ Database to convert epoch seconds to date and time components in different time zones.
Clock classes for Arduino that provides an auto-incrementing count of seconds since a known epoch which can be synchronized from external sources such as an NTP server, a DS3231 RTC chip, or an STM32 RTC chip.
Useful Arduino utilities which are too small as separate libraries, but complex enough to be shared among multiple projects, and often have external dependencies to other libraries.
Fast and compact software I2C implementations (SimpleWireInterface, SimpleWireFastInterface) on Arduino platforms. Also provides adapter classes to allow the use of third party I2C libraries using the same API.
This library allows to read a value from an analog input like an potentiometer, or from a digital input like an encoder. Moreover, allows to write it on digital output, exactly on PWM pin.
Enables Bluetooth® Low Energy connectivity on the Arduino MKR WiFi 1010, Arduino UNO WiFi Rev.2, Arduino Nano 33 IoT, Arduino Nano 33 BLE and Nicla Sense ME.
ESP32 + LwIP ENC28J60, including ESP32-S2, ESP32-S3 and ESP32-C3, Connection and Credentials Manager using AsyncWebServer, with enhanced GUI and fallback Web ConfigPortal.
ESP32 + LwIP W5500 / ENC28J60, including ESP32-S2, ESP32-S3 and ESP32-C3, Connection and Credentials Manager using AsyncWebServer, with enhanced GUI and fallback Web ConfigPortal.
ESP32 + LwIP W5500, including ESP32-S2, ESP32-S3 and ESP32-C3, Connection and Credentials Manager using AsyncWebServer, with enhanced GUI and fallback Web ConfigPortal.
(ESP8266 + LwIP W5500 / W5100(S) / ENC28J60) Connection and Credentials Manager using AsyncWebServer, with enhanced GUI and fallback Web ConfigPortal.
Simple Async HTTP Request library, supporting GET, POST, PUT, PATCH, DELETE and HEAD, on top of AsyncTCP library for ESP32/S2/S3/C3, WT32_ETH01 (ESP32 + LAN8720), ESP32 using LwIP ENC28J60, W5500, W6100 or LAN8720.
Simple Async HTTP Request library, supporting GET, POST, PUT, PATCH, DELETE and HEAD, on top of AsyncTCP libraries, such as AsyncTCP, ESPAsyncTCP, AsyncTCP_STM32, etc.. for ESP32 (including ESP32_S2, ESP32_S3 and ESP32_C3), WT32_ETH01 (ESP32 + LAN8720), ESP32 with LwIP ENC28J60, ESP8266 (WiFi, W5x00 or ENC28J60) and currently STM32 with LAN8720 or built-in LAN8742A Ethernet.
Simple Async HTTP Request library, supporting GET, POST, PUT, PATCH, DELETE and HEAD, on top of AsyncTCP_RP2040W library for RASPBERRY_PI_PICO_W with CYW43439 WiFi.
Simple Async HTTPS Request library, supporting GET, POST, PUT, PATCH, DELETE and HEAD, on top of AsyncTCP_SSL library for ESP32/S2/S3/C3, WT32_ETH01 (ESP32 + LAN8720), ESP32 using LwIP ENC28J60, W5500, W6100 or LAN8720.
Simple Async HTTPS Request library, supporting GET, POST, PUT, PATCH, DELETE and HEAD, on top of AsyncTCP_SSL library for ESP32 (including ESP32_S2, ESP32_S3 and ESP32_C3), WT32_ETH01 (ESP32 + LAN8720) and ESP32 with LwIP ENC28J60.
Fully Asynchronous UDP Library for ESP8266 using W5x00 or ENC28J60 Ethernet. The library is easy to use and includes support for Unicast, Broadcast and Multicast environments.
Fully Asynchronous UDP Library for RASPBERRY_PI_PICO_W using CYW43439 WiFi with arduino-pico core. The library is easy to use and includes support for Unicast, Broadcast and Multicast environments.
Fully Asynchronous UDP Library for Teensy 4.1 using QNEthernet. The library is easy to use and includes support for Unicast, Broadcast and Multicast environments.
ESP32 + LwIP LAN8720, including WT32-S1, ESP32-S2, ESP32-S3 and ESP32-C3, Connection and Credentials Manager using AsyncWebServer, with enhanced GUI and fallback Web ConfigPortal.
This library provides a low-level facility for context switching between multiple threads of execution and contains an implementation of asymmetric stackful coroutines on an AVR micro-controller.
The last hope for the desperate AVR programmer. A small (344 bytes) Arduino library to have real program traces and to find the place where your program hangs.
This library enables you to use Hardware-based PWM channels on AVR-based boards, such as Nano, UNO, Mega, Leonardo, 32u4, etc., to create and output PWM.
This library enables you to use ISR-based PWM channels on AVR-based boards, such as Mega-2560, UNO,Nano, Leonardo, etc., to create and output PWM any GPIO pin.
Enable inclusion of both ESP32 Blynk BT/BLE and WiFi libraries. Then select one at reboot or run both. Eliminate hardcoding your Wifi and Blynk credentials and configuration data saved in either LittleFS, SPIFFS or EEPROM.
Simple Ethernet Manager for MultiBlynk for Teensy, SAM DUE, SAMD21, SAMD51, nRF52, ESP32, ESP8266, RP2040-based (Nano_RP2040_Connect, RASPBERRY_PI_PICO) boards, etc. with or without SSL, configuration data saved in ESP8266/ESP32 LittleFS, SPIFFS, nRF52/RP2040 LittleFS/InternalFS, EEPROM, DueFlashStorage or SAMD FlashStorage.
Simple Blynk Credentials Manager for STM32 boards using built-in LAN8742A Ethernet, LAN8720, ENC28J60 or W5x00 Ethernet shields, with or without SSL, configuration data saved in EEPROM.
Simple GSM shield Credentials Manager for Blynk and ESP32 / ESP8266 boards, with or without SSL, configuration data saved in LittleFS / SPIFFS / EEPROM.
Simple WiFiManager for Blynk and ESP32 with or without SSL, configuration data saved in either SPIFFS or EEPROM. Enable inclusion of both ESP32 Blynk BT/BLE and WiFi libraries. Then select one at reboot or run both. Eliminate hardcoding your Wifi and Blynk credentials and configuration data saved in either LittleFS, SPIFFS or EEPROM. Using AsyncWebServer instead of WebServer, with WiFi networks scanning for selection in Configuration Portal.
Simple GSM shield Credentials Manager for Blynk and ESP32 / ESP8266 boards, with or without SSL, configuration data saved in LittleFS / SPIFFS / EEPROM.
Simple Async WiFiManager for Blynk and ESP32 (including ESP32-S2, ESP32-C3), ESP8266 with or without SSL, configuration data saved in either LittleFS, SPIFFS or EEPROM. Now working with new ESP8266 core v3.0.1 and ESP32 core v1.0.6
Simple WiFiManager for Blynk with MultiWiFi Credentials, for Mega, SAM DUE, SAMD21, SAMD51, nRF52, STM32F/L/H/G/WB/MP1, Teensy, RP2040-based RASPBERRY_PI_PICO, etc. boards running ESP8266/ESP32-AT shields. Configuration data saved in EEPROM, EEPROM-emulated FlashStorage_STM32 or FlashStorage_SAMD, SAM-DUE DueFlashStorage or nRF52/TP2040 LittleFS.
Simple WiFiManager for Blynk and ESP32 (including ESP32-S2, ESP32-C3), ESP8266 with or without SSL, configuration data saved in either LittleFS, SPIFFS or EEPROM. Now working with new ESP8266 core v3.0.0 and ESP32 core v1.0.6
Simple WiFiManager for Blynk and Mega, UNO WiFi Rev2, Teensy, SAM DUE, SAMD21, SAMD51, STM32, nRF52, RP2040-based boards, etc. using WiFiNINA shields, configuration data saved in EEPROM, FlashStorage_SAMD, FlashStorage_STM32, DueFlashStorage, nRF52/RP2040 LittleFS
An Arduino library that takes input in degrees and output a string or integer for the 4, 8, 16, or 32 compass headings (like North, South, East, and West).
CRMui3 WebFramework build a web app (Web UI) for ESP8266 and ESP32 in your project in minutes! / CRMui3 WebFramework для esp8266 и esp32. Позволяет быстро и просто создать веб интерфейс для настройки и управления устройством.
DDNS Update Client Library for SAM DUE, nRF52, SAMD21/SAMD51, STM32F/L/H/G/WB/MP1, AVR Mega, megaAVR, Teensy, RP2040-based RASPBERRY_PI_PICO, WT32_ETH01, Portenta_H7, etc. besides ESP8266/ESP32, using ESP8266-AT/ESP32-AT WiFi, WiFiNINA, Ethernet W5x00, ENC28J60, LAN8742A or Teensy NativeEthernet
AS7341 is a 11 channel visible light sensor, which can measure 8 wavelengths of visible light, suitable for color detection, light color temperature detection and other scenes(SKU:SEN0365)
This Bluetooth module features Bluetooth/U-disk/TF-card playback, and Bluetooth call function, supporting simple and clear serial port control function, BLE pass-through, and SPP pass-through functions(SKU:DFR0781)
Library to detect a double reset, using EEPROM, DueFlashStorage, FlashStorage_SAMD, FlashStorage_RTL8720, FlashStorage_STM32 or LittleFS/InternalFS. For AVR, Teensy, SAM DUE, SAMD, STM32F/L/H/G/WB/MP1, nRF52, RP2040-based Nano_RP2040_Connect, RASPBERRY_PI_PICO, RTL8720DN, MBED nRF52840-based Nano_33_BLE, Portenta_H7, etc. boards. Now using efficient FlashStorage_STM32 library and supporting new RP2040-based Nano_RP2040_Connect, Portenta_H7, RASPBERRY_PI_PICO and STM32 core v2.0.0
Directly interface Arduino, esp8266, and esp32 to DSC PowerSeries and Classic security systems for integration with home automation, remote control apps, notifications on alarm events, and emulating DSC panels to connect DSC keypads.
This library enables you to use Hardware-based PWM channels on Arduino AVRDx-based boards (AVR128Dx, AVR64Dx, AVR32Dx, etc.), using DxCore, to create and output PWM.
This library enables you to use ISR-based PWM channels on Arduino AVRDx-based boards (AVR128Dx, AVR64Dx, AVR32Dx, etc.), using DxCore, to create and output PWM any GPIO pin.
Small and easy to use Arduino library for using push buttons at INT0/pin2 and / or any PinChangeInterrupt pin.Functions for long and double press detection are included.Just connect buttons between ground and any pin of your Arduino - that"s itNo call of begin() or polling function like update() required. No blocking debouncing delay.
Arduino library for controlling standard LEDs in an easy way. EasyLed provides simple logical methods like led.on(), led.toggle(), led.flash(), led.isOff() and more.
OpenTherm Library to control Central Heating (CH), HVAC (Heating, Ventilation, Air Conditioning) or Solar systems by creating a thermostat using Arduino IDE and ESP32 / ESP8266 hardware.
ESP32 (including ESP32-S2, ESP32-S3 and ESP32-C3), ESP8266 WiFi Connection Manager using AsyncWebServer, with enhanced GUI and fallback Web ConfigPortal.
Light-Weight MultiWiFi/Credentials Async WiFiManager for ESP32 (including ESP32-S2, ESP32-S3 and ESP32-C3) and ESP8266 boards. Powerful-yet-simple-to-use feature to enable adding dynamic custom parameters.
Start serving a local webpage if cannot connect to WiFi, also include Buffer for to WiFi client to prevent small packets with partial messages being sent.
This library providing the possibility to call a function at specific ESP32 Control module.This library support all version of ESP32 Control module,ERS ,E1.0
This library providing the possibility to call a function at specific ESP32 Control module.This library support all version of ESP32 Control module,ERS ,E1.0
A library for driving self-timed digital RGB/RGBW LEDs (WS2812, SK6812, NeoPixel, WS2813, etc.) using the Espressif ESP32 microcontroller"s RMT output peripheral.
ESP32LitePack, M5Lite, A lightweight compatibility library. Support Devices:M5StickC, M5StickC Plus, M5Stack BASIC, M5Stack GRAY, M5Stack FIRE, M5Stack Core2, M5Stack ATOM Lite, M5Stack ATOM Matrix, M5Stack ATOM ECHO
Simple library for sending and recieving booleans, bytes, integers, and float variables over UDP. The esp32 can be connected to a wifi network or create its own hotspot.
ESP32 + LwIP ENC28J60, including ESP32-S2, ESP32-S3 and ESP32-C3, Connection and Credentials Manager using AsyncWebServer, with enhanced GUI and fallback Web ConfigPortal.
(ESP32 + LwIP W5500 / ENC28J60), including ESP32-S2, ESP32-S3 and ESP32-C3, Connection and Credentials Manager, with enhanced GUI and fallback Web ConfigPortal.
This library enables you to use Interrupt from Hardware Timers on an ESP32, ESP32_S2, ESP32_S3 or ESP32_C3-based board to create and output PWM to pins.
ESP32 + LwIP W5500, including ESP32-S2, ESP32-S3 and ESP32-C3, Connection and Credentials Manager using AsyncWebServer, with enhanced GUI and fallback Web ConfigPortal.
Simple WebServer library for AVR, Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52, SIPEED_MAIX_DUINO and RP2040-based (RASPBERRY_PI_PICO) boards using ESP8266/ESP32 AT-command shields with functions similar to those of ESP8266/ESP32 WebServer libraries
WizFi360/ESP8266/ESP32-AT library for Arduino providing an easy-to-use way to control WizFi360/ESP8266-AT/ESP32-AT WiFi shields using AT-commands. For AVR, Teensy, SAM DUE, SAMD21, SAMD51, STM32, nRF52, SIPEED_MAIX_DUINO and RP2040-based (Nano_RP2040_Connect, RASPBERRY_PI_PICO, etc.) boards using WizFi360/ESP8266/ESP32 AT-command shields.
WiFi/Credentials Manager for nRF52, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, RP2040-based Nano_RP2040_Connect, RASPBERRY_PI_PICO, etc. boards using WizFi360/ESP8266/ESP32-AT-command shields with fallback web configuration portal. Credentials are saved in EEPROM, SAMD FlashStorage, DueFlashStorage or nRF52/RP2040 LittleFS.
Light-Weight WiFi/Credentials Manager for AVR Mega, SAM DUE, SAMD, nRF52, STM32, RP2040-based Nano_RP2040_connect, RASPBERRY_PI_PICO boards, etc. using WizFi360/ESP8266/ESP32-AT-command shields. Powerful-yet-simple-to-use feature to enable adding dynamic custom parameters.
Library to detect a multi reset within a predetermined time, using RTC Memory, EEPROM, LittleFS or SPIFFS for ESP8266 and ESP32, ESP32_C3, ESP32_S2, ESP32_S3
Library to configure MultiWiFi/Credentials at runtime for ESP32 (including ESP32-S2, ESP32-S3 and ESP32-C3) and ESP8266 boards. With enhanced GUI and fallback web ConfigPortal.
Light-Weight MultiWiFi/Credentials Manager for ESP32 (including ESP32-S2, ESP32-S3 and ESP32-C3) and ESP8266 boards. Powerful-yet-simple-to-use feature to enable adding dynamic custom parameters.
Simple Ethernet WebServer, HTTP Client and WebSocket Client library for AVR, AVR Dx, Portenta_H7, Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52 and RASPBERRY_PI_PICO boards using Ethernet shields W5100, W5200, W5500, W6100, ENC28J60 or Teensy 4.1 NativeEthernet/QNEthernet
Simple TLS/SSL Ethernet WebServer, HTTP Client and WebSocket Client library for for AVR, Portenta_H7, Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52 and RASPBERRY_PI_PICO boards using Ethernet shields W5100, W5200, W5500, ENC28J60 or Teensy 4.1 NativeEthernet/QNEthernet. It now supports Ethernet TLS/SSL Client.
Simple TLS/SSL Ethernet WebServer, HTTP Client and WebSocket Client library for STM32F/L/H/G/WB/MP1 boards running WebServer using built-in Ethernet LAN8742A, Ethernet LAN8720, W5x00 or ENC28J60 shields. It now supports Ethernet TLS/SSL Client.
EthernetWebServer_STM32 is a simple Ethernet WebServer, HTTP Client and WebSocket Client library for STM32F/L/H/G/WB/MP1 boards using built-in Ethernet LAN8742A, LAN8720, Ethernet W5x00 or ENC28J60 shields
Simple Ethernet library for AVR, AVR Dx, Portenta_H7, Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52 and RASPBERRY_PI_PICO boards using Ethernet shields W5100, W5200, W5500, W5100S, W6100
Simple Ethernet Manager for Teensy, SAM DUE, SAMD, nRF52, ESP32 (including ESP32-S2/C3), ESP8266, RP2040-based Nano_RP2040_Connect, RASPBERRY_PI_PICO, etc. boards. Config data saved in ESP LittleFS, SPIFFS or EEPROM, nRF52 LittleFS, EEPROM, DueFlashStorage or SAMD FlashStorage.
Simple Ethernet Manager for STM32F/L/H/G/WB/MP1 boards with Ethernet LAN8720, W5x00, ENC28J60 or built-in LAN8742A shields, with or without SSL, configuration data saved in EEPROM. With DoubleResetDetect feature.
ezTime - pronounced "Easy Time" - is a very easy to use Arduino time and date library that provides NTP network time lookups, extensive timezone support, formatted time and date strings, user events, millisecond precision and more.
ESP32 VGA, PAL/NTSC Color Composite, SSD1306 ILI9341 ST7789 Controller, PS/2 Mouse and Keyboard Controller, Graphics Library, Graphical User Interface (GUI), Sound Engine, Game Engine and ANSI/VT Terminal
A library for implementing fixed-point in-place Fast Fourier Transform on Arduino. It sacrifices precision and instead it is way faster than floating-point implementations.
The FlashStorage_RTL8720 library aims to provide a convenient way to store and retrieve user data using the non-volatile flash memory of Realtek RTL8720DN, RTL8722DM, RTM8722CSM, etc.
The FlashStorage library aims to provide a convenient way to store and retrieve user"s data using the non-volatile flash memory of SAMD21/SAMD51. It"s using the buffered read and write to minimize the access to Flash. It now supports writing and reading the whole object, not just byte-and-byte.
The FlashStorage_STM32 library aims to provide a convenient way to store and retrieve user data using the non-volatile flash memory of STM32F/L/H/G/WB/MP1. It is using the buffered read and write to minimize the access to Flash. It now supports writing and reading the whole object, not just byte-and-byte. New STM32 core v2.0.0+ is also supported now.
The FlashStorage_STM32F1 library aims to provide a convenient way to store and retrieve user"s data using the non-volatile flash memory of STM32F1/F3. It"s using the buffered read and write to minimize the access to Flash. It now supports writing and reading the whole object, not just byte-and-byte. New STM32 core v2.0.0+ is supported now.
FTP Client for Generic boards such as AVR Mega, megaAVR, Portenta_H7, Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52, RP2040-based (Nano-RP2040-Connect, RASPBERRY_PI_PICO, RP2040W, etc.), ESP32/ESP8266 using Ethernet
The GCodeParser library is a lightweight G-Code parser for the Arduino using only a single character buffer to first collect a line of code (also called a "block") from a serial or file input and then parse that line into a code block and comments.
This library is for the Great Lunar Expedition for Everyone mission, which will provide accessible opportunities for students to directly participate in Lunar exploration.
Basic to advanced line following, intersection detection, basic motor control, battery monitoring, gripper control, and basic collision detection with the Gobbit robot.
Enables GSM/GRPS network connection using the Generic GSM shields/modules. Supporting ESP32 (including ESP32-S2, ESP32-C3), ESP8266, Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52, RP2040-based boards, etc.
Arduino library for the Flysky/Turnigy RC iBUS protocol - servo (receive) and sensors/telemetry (send) using hardware UART (AVR, ESP32 and STM32 architectures)
An Arduino library to control the Iowa Scaled Engineering I2C-IRSENSE ( https://www.iascaled.com/store/I2C-IRSENSE ) reflective infrared proximity sensor.
This library provides an interface to control a stepper motor through Infineon’s Stepper Motor Control Shield "KIT_XMC1300_IFX9201" with h-bridge IFX9201 and XMC1300 microcontroller.
Treat PCF8574, MCP23017 and Shift registers like pins, matrix keypad, touch screen handler, button press and rotary encoder management (switches) on any supported IO (including DfRobot & Joysticks) with event handling, interchangable AVR/I2C(AT24) EEPROMs.
This library uses polymorphism and defines common interfaces for reading encoders and controlling motors allowing for easy open or closed loop motor control.
Convinient way to map a push-button to a keyboard key. This library utilize the ability of 32u4-based Arduino-compatible boards to emulate USB-keyboard.
This library allows you to easily create light animations from an Arduino board or an ATtiny microcontroller (traffic lights, chaser, shopkeeper sign, etc.)
Light-weight implementation of LinkedList library, that is now stripped down to bare minimum, making it appropriate for use in memory-critical environments.
LiquidCrystal fork for displays based on HD44780. Uses the IOAbstraction library to work with i2c, PCF8574, MCP23017, Shift registers, Arduino pins and ports interchangably.
LittleFS for esp32 based on esp_littlefs IDF component. Use esp32 core-provided LITTLEFS library instead of this one when available in future core releases.
An all in one, easy to use, powerful, self contained button library so you can focus on your other code! Includes Debouncing, Avoids Delays, multiclicks and allows you to decide what happens at the beginning and end of Short, Long, Hold and Shifts so you can create a intuative and responsive experience.
This library enables you to use ISR-based PWM channels on RP2040-based boards, such as Nano_RP2040_Connect, RASPBERRY_PI_PICO, with Arduino-mbed (mbed_nano or mbed_rp2040) core to create and output PWM any GPIO pin.
Arduino library for MCP4728 quad channel, 12-bit voltage output Digital-to-Analog Convertor with non-volatile memory and I2C compatible Serial Interface
mDNS Library for ESP32, ESP8266, nRF52, SAMD21, SAMD51, SAM DUE, STM32F/L/H/G/WB/MP1, Portenta_H7, AVR Mega, RP2040-based boards, etc. using Ethernet W5x00, ESP WiFi, WiFiNINA or ESP8266-AT shields
This library enables you to use Hardware-based PWM channels on megaAVR-based boards, such as UNO WiFi Rev2, AVR_Nano_Every, etc., to create and output PWM.
This library enables you to use ISR-based PWM channels on an Arduino megaAVR board, such as UNO WiFi Rev2, AVR_Nano_Every, etc., to create and output PWM any GPIO pin.
Replace Arduino methods with mocked versions and let you develop code without the hardware. Run parallel hardware and system development for greater efficiency.
A library package for ARDUINO acting as ModBus slave communicating through UART-to-RS485 converter. Originally written by Geabong github user. Improved by Łukasz Ślusarczyk.
Library to detect a multi reset, using EEPROM, DueFlashStorage, FlashStorage_SAMD, FlashStorage_RTL8720, FlashStorage_STM32 or LittleFS/InternalFS. For AVR, Teensy, SAM DUE, SAMD, STM32F/L/H/G/WB/MP1, nRF52, RP2040-based Nano_RP2040_Connect, RASPBERRY_PI_PICO, RTL8720DN, MBED nRF52840-based Nano_33_BLE, Portenta_H7, etc. boards. Now using efficient FlashStorage_STM32 library and supporting new RP2040-based Nano_RP2040_Connect, RASPBERRY_PI_PICO and STM32 core v2.0.0
Connects to MySQL or MariaDB using ESP8266/ESP32, WT32_ETH01 (ESP32 + LAN8720A), nRF52, SAMD21/SAMD51, STM32F/L/H/G/WB/MP1, Teensy, SAM DUE, Mega, RP2040-based boards, Portenta_H7, etc. with W5x00, ENC28J60 Ethernet, Teensy 4.1 NativeEthernet/QNEthernet, WiFiNINA modules/shields or Portenta_H7 WiFi/Ethernet. W5x00 can use Ethernet_Generic library. ENC28J60 can use either EthernetENC or UIPEthernet Library.
This library enables you to use ISR-based PWM channels on an nRF52-based board using Arduino-mbed mbed_nano core such as Nano-33-BLE to create and output PWM any GPIO pin.
This library enables you to use ISR-based PWM channels on an nRF52-based board using Adafruit_nRF52_Arduino core such as Itsy-Bitsy nRF52840 to create and output PWM any GPIO pin.
An Arduino library for the Nano 33 BLE Sense that leverages Mbed OS to automatically place sensor measurements in a ring buffer that can be integrated into programs in a simple manner.
The library for OpenBCI Ganglion board. Please use the DefaultGanglion.ino file in the examples to use the code that ships with every Ganglion board. Look through the skimmed down versions of the main firmware in the other examples.
OpenDevice is a set of tools and APIs to build solutions for the "Internet of Things" like home automations systems, robotics, smart city, energy monitoring, security, sensor monitoring
A library written in C++ to encode/decode PDU data for GSM modems. Both GSM 7-bit and UCS-2 16 bit alphabets are supported which mean, in practice, you can send/receive SMS in any language (including emojis).
Simple Async HTTP Request library, supporting GET, POST, PUT, PATCH, DELETE and HEAD, on top of Portenta_H7_AsyncTCP library for Portenta_7, using Vision-shield thernet or Murata WiFi.
his library enables you to use Hardware-based PWM channels on RP2040-based boards, such as Nano_RP2040_Connect, RASPBERRY_PI_PICO, with either Arduino-mbed (mbed_nano or mbed_rp2040) or arduino-pico core to create and output PWM to any GPIO pin.
This library enables you to use SPI SD cards with RP2040-based boards such as Nano_RP2040_Connect, RASPBERRY_PI_PICO using either RP2040 Arduino-mbed or arduino-pico core.
This library enables you to use ISR-based PWM channels on RP2040-based boards, such as ADAFRUIT_FEATHER_RP2040, RASPBERRY_PI_PICO, etc., with arduino-pico core to create and output PWM any GPIO pin.
This library enables you to use Interrupt from Hardware Timers on SAMD-based boards such as SAMD21 Nano-33-IoT, Adafruit SAMD51 Itsy-Bitsy M4, SeeedStudio XIAO, Sparkfun SAMD51_MICROMOD, etc.
The most powerful and popular available library for using 7/14/16 segment display, supporting daisy chaining so you can control mass amounts from your Arduino!
Provides methods to retrieve instant and peak values from the ADC input. The Arduino library SensorWLED splits the input from a varying analog signal from the ADC into components, i.e., provides the capability of a sample-and-hold circuit.
A user interface through the serial channel (menus, sub-menus and command execution), with support for navigation through the menu hierarchy and online help.
Enables smooth servo movement. Linear as well as other (Cubic, Circular, Bounce, etc.) ease movements for servos are provided. The Arduino Servo library or PCA9685 servo expanders are supported.
An associative container used either as a list or btree without needing std lib, and a concurrent circular buffer. Works from AVR/Uno upwards to ESP32, mbed etc
Use the low-power high-resolution ICM 20948 9 DoF IMU from Invensense with I2C or SPI. Version 1.2 of the library includes support for the InvenSense Digital Motion Processor (DMP™).
The VL6180 combines an IR emitter, a range sensor, and an ambient light sensor together for you to easily use and communicate with via an I2C interface.
The ZX Sensor uses infrared light to determine the distance from an object and where the object is located on the X axis (between IR LEDs), available from SparkFun Electronics
Statistic, Sum, Max, Min, Sq_Sum, Arithmetic Average, Geometric Average, RMS Average, Ext RMS Average, Bubble Sort, Median, Standard Deviation, Standard Deviation Error, Coefficient Factor, Average, Stream, Regression, Slope, Data, Analyse
Enables reading and writing on SD card using SD card slot connected to the SDIO/SDMMC-hardware of the STM32 MCU. For slots connected to SPI-hardware use the standard Arduino SD library.
BufferedPrint stream for efficient networking. ChunkedPrint for HTTP chunked encoding. ChunkedStreamReader for HTTP chunked decoding. CStringBulder builds a c-string with Print class methods. StringReadStream to wrap string as Stream. And printf() function with formatting string from F macro.
Menu library for Arduino with IoT capabilities that supports many input and display devices with a designer UI, code generator, CLI, and strong remote control capability.
Adds tcUnicode UTF-8 support to Adafruit_GFX, U8G2, tcMenu, and TFT_eSPI graphics libraries with a graphical font creation utility available. Works with existing libraries
This library enables you to use Hardware-based PWM channels on Teensy boards, such as Teensy 2.x, Teensy LC, Teensy 3.x, Teensy 4.x, Teensy MicroMod, etc., to create and output PWM to pins. Using the same functions as other FastPWM libraries to enable you to port PWM code easily between platforms.
This library enables you to use ISR-based PWM channels on Teensy boards, such as Teensy 2.x, Teensy LC, Teensy 3.x, Teensy 4.x, Teensy MicroMod, etc., to create and output PWM any GPIO pin.
A library for creating Tickers which can call repeating functions. Replaces delay() with non-blocking functions. Recommanded for ESP and Arduino boards with mbed behind.
This library enables you to use Interrupt from Hardware Timers on an Arduino, Adafruit or Sparkfun AVR board, such as Nano, UNO, Mega, Leonardo, YUN, Teensy, Feather_32u4, Feather_328P, Pro Micro, etc.
This library enables you to use Interrupt from Hardware Timers on supported Arduino boards such as AVR, Mega-AVR, ESP8266, ESP32, SAMD, SAM DUE, nRF52, STM32F/L/H/G/WB/MP1, Teensy, Nano-33-BLE, RP2040-based boards, etc.
A simple library to display numbers, text and animation on 4 and 6 digit 7-segment TM1637 based display modules. Offers non-blocking animations and scrolling!
I2C EEPROM library. Split from uRTCLib https://github.com/Naguissa/uRTCLib - This library controls any I2C EEPROM, independent ones or incorporated on DS1307 or DS3231 RTCs.
Really tiny library to basic RTC functionality on Arduino. DS1307, DS3231 and DS3232 RTCs are supported. See https://github.com/Naguissa/uEEPROMLib for EEPROM support. Temperature, Alarms, SQWG, Power lost and RAM support.
Monochrome LCD, OLED and eInk Library. Display controller: SSD1305, SSD1306, SSD1309, SSD1312, SSD1316, SSD1318, SSD1320, SSD1322, SSD1325, SSD1327, SSD1329, SSD1606, SSD1607, SH1106, SH1107, SH1108, SH1122, T6963, RA8835, LC7981, PCD8544, PCF8812, HX1230, UC1601, UC1604, UC1608, UC1610, UC1611, UC1617, UC1638, UC1701, ST7511, ST7528, ST7565, ST7567, ST7571, ST7586, ST7588, ST75160, ST75256, ST75320, NT7534, ST7920, IST3020, IST3088, IST7920, LD7032, KS0108, KS0713, HD44102, T7932, SED1520, SBN1661, IL3820, MAX7219, GP1287, GP1247, GU800. Interfaces: I2C, SPI, Parallel.
True color TFT and OLED library, Up to 18 Bit color depth. Supported display controller: ST7735, ILI9163, ILI9325, ILI9341, ILI9486,LD50T6160, PCF8833, SEPS225, SSD1331, SSD1351, HX8352C.
A rotary encoder library that allows the callback of up to 9 different functions representing the same number of different encoder events. These different functions can be associated with events like press rotate and long press among many others.
RFC6455-based WebSockets Server and Client for Arduino boards, such as nRF52, Portenta_H7, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, Teensy, SAM DUE, RP2040-based boards, besides ESP8266/ESP32 (ESP32, ESP32_S2, ESP32_S3 and ESP32_C3) and WT32_ETH01. Ethernet shields W5100, W5200, W5500, ENC28J60, Teensy 4.1 NativeEthernet/QNEthernet or Portenta_H7 WiFi/Ethernet. Supporting websocket only mode for Socket.IO. Ethernet_Generic library is used as default for W5x00. Now supporting RP2040W
Light-Weight MultiWiFi/Credentials Manager for Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52, RTL8720, etc. boards running Generic WiFi (WiFiNINA, WiFi101, ESP8266-AT, ESP32-AT, etc.) modules/shields. Powerful-yet-simple-to-use feature to enable adding dynamic custom parameters.
Light-Weight MultiWiFi/Credentials Manager for AVR Mega, Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52, RP2040-based (Nano RP2040 Connect, RASPBERRY_PI_PICO) boards, etc. using u-blox WiFiNINA / WiFi101 modules/shields. Powerful-yet-simple-to-use feature to enable adding dynamic custom parameters.
Light-Weight MultiWiFi/Credentials Manager for Portenta_H7 boards using built-in WiFi (Murata) modules/shields. Powerful-yet-simple-to-use feature to enable adding dynamic custom parameters.
MultiWiFi/Credentials Manager for RP2040W boards using built-in CYW43439 WiFi. Powerful-yet-simple-to-use feature to enable adding dynamic custom parameters.
Light-Weight MultiWiFi/Credentials Manager for RP2040W boards using built-in CYW43439 WiFi. Powerful-yet-simple-to-use feature to enable adding dynamic custom parameters.
Light-Weight MultiWiFi/Credentials Manager for Realtek RTL8720DN, RTL8722DM, RTM8722CSM, etc. boards. Powerful-yet-simple-to-use feature to enable adding dynamic custom parameters.
Enables network connection (local and Internet) and WiFiStorage for SAM DUE, SAMD21, SAMD51, Teensy, AVR (328P, 32u4, 16u4, etc.), Mega, STM32F/L/H/G/WB/MP1, nRF52, NINA_B302_ublox, NINA_B112_ublox, RP2040-based boards, etc. in addition to Arduino MKR WiFi 1010, Arduino MKR VIDOR 4000, Arduino UNO WiFi Rev.2, Nano 33 IoT, Nano RP2040 Connect. Now with fix of severe limitation to permit sending much larger data than total 4K and using new WiFi101_Generic library
Simple WiFiWebServer, HTTP Client and WebSocket Client library for AVR Mega, megaAVR, Portenta_H7, Teensy, SAM DUE, SAMD21, SAMD51, STM32F/L/H/G/WB/MP1, nRF52, RP2040-based (Nano-RP2040-Connect, RASPBERRY_PI_PICO, RASPBERRY_PI_PICO_W, ESP32/ESP8266, etc.) boards using WiFi, such as WiFiNINA, WiFi101, CYW43439, U-Blox W101, W102, ESP8266/ESP32-AT modules/shields, with functions similar to those of ESP8266/ESP32 WebServer libraries.
Simple WiFiWebServer, HTTP Client, MQTT and WebSocket Client library for Realtek RTL8720DN, RTL8722DM, RTM8722CSM boards using WiFi. Supporting WiFi at 2.4GHz and 5GHz
Universal Timer with 1 millisecond resolution, based on system uptime (i.e. Arduino: millis() function or STM32: HAL_GetTick() function), supporting OOP principles.

This website is using a security service to protect itself from online attacks. The action you just performed triggered the security solution. There are several actions that could trigger this block including submitting a certain word or phrase, a SQL command or malformed data.
In this tutorial, we will be Interfacing a 7-inch DWIN HMI TFT LCD Display with Arduino Nano Board. Using this DWIN Display we can control various modules like Relay, Servo Motor, and RGB LED. We will also learn how to create the UI using the DGUS Software.
Before moving ahead, go through the DWIN Getting Started Guide to learn more about the DWIN Display and the method to upload the firmware. Since the DWIN Display has UART Interface, we can communicate with Arduino through Serial Communication. Let’s see how we can build this System.
DGUS(DWIN Graphic Utilized Software) is a cost-effective GUI software platform developed by DWIN Technology. Based on the K600+ Kernel hardware platform, GUI design, combined with a simple command interface, can be achieved quickly, eliminating the need for complicated programming and expensive development environments.
Download the DGUS Software from the above link and then extract the folder. Open the extracted folder and run the executable file called ‘DGUS_V7.642.exe‘. A DGUS Window will open. Initially, you need to change to the English language as the Chinese language is set by default.
The link for all the files including the DWIN_Set folder, images, ICL files, etc are inside the folder below. You can extract them and use them in your project.
Each and every module/units have a different Memory Address (assigned as VP). For example in the above UI, the memory address for Servo=5100, Red LED=5200, Green LED=5300, Blue LED=5400 & Relay=5500.
After creating the UI using the DGUS Software, download the firmware to DWIN LCD Display either using the T5L Download tool or using the SD Card. Follow the previous guide.
Before interfacing please check on the back of the DWIN Module whether the TTL Module is enabled or not. In case its not enabled, solder the terminals to enable the TTL Communication.
Connect the Servo Motor and Relay VCC & GND Pin to Arduino 5V & GND Pin. Also connect the Servo Motor to D3 of Arduino as Servo requires PWM Signal for operation. Connect the Relay output pin to D2 of Arduino. The RGB LED Module is connected to Pin D4, D5, and D6 of Arduino.
Coming to the DWIN LCD Display and Arduino part, UART Serial Communication is required. Therefore connect the TX2, and RX2 of DWIN Display to Arduino RX & TX Pin respectively. Supply the 5V to both Arduino and Display using their respective USB Cable. The GND connection should be common for both Arduino & Display.
If you don’t want to assemble the circuit on a breadboard and you want PCB for the project, then here is the PCB for you. I used EasyEDA to design the Schematic & PCB. The Schematic & PCB Board for DWIN LCD Arduino Interfacing looks something like the below.
You can now upload the Gerber File to the Website and place an order. The PCB quality is superb & high standard. That is why most of people trust NextPCB for PCB & PCBA Services.
This is the frame that display sends whenever any button is touched in the display UI. You can check this using by connecting USB-to-TTL Module to DWIN Display pins.
After the code is uploaded, you can start testing the entire system. The created UI looks like this and has the option to go into next page by clicking on Servo, LED and Relay.
Go back to the homepage and click on RGB LED to enter into the next page. You can slide the Red, Green, Blue Slider to control the brightness and intensity of RGB Light. You can also mix colors to generate different color lights.
Go back to the homepage again. Click on Servo Control option from the display. In this mode you can select ON/OFF option to turn on or off the Relay Module.

In this tutorial we will learn how servo motors work and how to control servo motors with Arduino. Servo motors are very popular and widely used in many Arduino projects because they are easy to use and provide great position control.
Servos are great choice for robotics projects, automation, RC models and so on. I have already used them in many of my Arduino projects and you can check out some of them here:
You can watch the following video or read the written tutorial below. It includes several examples how to use a servo motor with Arduino, wiring diagram and codes. In additional, it has a guide how to control multiple servo motors with Arduino using the PCA9685 PWM driver.
A servo motor is a closed-loop system that uses position feedback to control its motion and final position. There are many types of servo motors and their main feature is the ability to precisely control the position of their shaft.
In industrial type servo motors the position feedback sensor is usually a high precision encoder, while in the smaller RC or hobby servos the position sensor is usually a simple potentiometer. The actual position captured by these devices is fed back to the error detector where it is compared to the target position. Then according to the error the controller corrects the actual position of the motor to match with the target position.
Hobby servos are small in size actuators used for controlling RC toys cars, boats, airplanes etc. They are also used by engineering students for prototyping in robotics, creating robotic arms, biologically inspired robots, humanoid robots and so on.
There are four main components inside of a hobby servo, a DC motor, a gearbox, a potentiometer and a control circuit. The DC motor is high speed and low torque but the gearbox reduces the speed to around 60 RPM and at the same time increases the torque.
The potentiometer is attached on the final gear or the output shaft, so as the motor rotates the potentiometer rotates as well, thus producing a voltage that is related to the absolute angle of the output shaft. In the control circuit, this potentiometer voltage is compared to the voltage coming from the signal line. If needed, the controller activates an integrated H-Bridge which enables the motor to rotate in either direction until the two signals reach a difference of zero.
A servo motor is controlled by sending a series of pulses through the signal line. The frequency of the control signal should be 50Hz or a pulse should occur every 20ms. The width of pulse determines angular position of the servo and these type of servos can usually rotate 180 degrees (they have a physical limits of travel).
Generally pulses with 1ms duration correspond to 0 degrees position, 1.5ms duration to 90 degrees and 2ms to 180 degrees. Though the minimum and maximum duration of the pulses can sometimes vary with different brands and they can be 0.5ms for 0 degrees and 2.5ms for 180 degrees position.
There are many different models and manufacturers of RC or hobby. The main consideration when choosing a servo motor is its torque, operating voltage, current draw and size.
Let’s put the above said to test and make a practical example of controlling a hobby servo using Arduino. I will use the MG996R which is a high-torque servo featuring metal gearing with stall torque of 10 kg-cm. The high torque comes at a price and that’s the stall current of the servo which is 2.5A. The running current is from 500mA to 900mA and the operating voltage is from 4.8 to 7.2V.
We simply need to connect the control pin of the servo to any digital pin of the Arduino board, connect the Ground and the positive wires to the external 5V power supply, and also connect the Arduino ground to the servo ground.
The S90 Micro Servo has lower current consumption, around 100-200mA no-load running current, but around 500-700mA stall current. On the other hand, the Arduino 5V pin can output only around 500mA if powered via USB, or up to 1A in powered via the barrel connector.
Even though it’s possible to run these 9g servo motors directly to Arduino, for more stable work I would suggest to always use an external power supply for them.
Now let’s take a look at the Arduino code for controlling the servo motor. The code is very simple. We just need to define the pin to which the servo is connect, define that pin as an output, and in the loop section generate pulses with the specific duration and frequency as we explained earlier.
After some testing I came up with the following values for the duration of the pulses that work with my servo. Pulses with 0.6ms duration corresponded to 0 degrees position, 1.45ms to 90 degrees and 2.3ms to 180 degrees.
I connected a multimeter in series with the servo to check the current draw. The maximum current draw that I noticed was up to 0.63A at stall. Well that’s because this isn’t the original TowerPro MG996R servo, but a cheaper replica, which obviously has worse performance.
Here we just need to include the library, define the servo object, and using the attach() function define the pin to which the servo is connected as well as define the minimum and maximum values of the pulses durations. Then using the write() function we simply set the position of the servo from 0 to 180 degrees.
The Arduino servo library supports controlling of up to 12 servos at the same time with most the Arduino boards, and 48 servos using the Arduino Mega board. On top of that, controlling multiple servo motors with Arduino is as easy as controlling just a single one.
So, we just have to create objects from the Servo class for each servo motor, and define to which Arduino pin is connected. Of course, we can set any servo to move to any position, at any time.
There’s also another way of controlling servos with Arduino, and that’s using the PCA9685 servo driver. This is a 16-Channel 12-bit PWM and servo driver which communicates with Arduino using the I2C bus. It has a built in clock so it can drive 16 servos free running, or independently of Arduino.
What’s even cooler we can daisy-chain up to 62 of these drivers on a single I2C bus. So theoretically we can control up to 992 servos using only the two I2C pins from the Arduino board. The 6 address select pins are used for setting different I2C addressed for each additional driver. We just need to connect the solder pads according to this table.
So first we need to include the libraries and define the PCA9685 object. Then using the Servo_Evaluator instance define the pulses duration or the PWM output of the driver. Note that the outputs are 12-bit, or that’s a resolution of 4096 steps. So the minimum pulse duration of 0.5ms or 0 degrees position would correspond to 102 steps, and the maximum pulse duration of 2.5ms or 180 degrees position to 512 steps. But as explained earlier these values should be adjusted according your servo motor. I had value from 102 to 470 which corresponded to 0 to 180 degrees position.
I connected a second servo to the driver, and as I expected, it wasn’t positioning the same as the first one, and that’s because the servos that I’m using are cheap copies and they are not so reliable. However, this isn’t a big problem because using the Servo_Evaluator instance we can set different output settings for each servo. We can also adjust the 90 degrees position in case it’s not precisely in the middle. In that way all servos will work the same and position at the exact angle.
So we should create separate PCA9685 object for each driver, define the addresses for each driver as well as set the frequency to 50Hz. Now simply using the setChannelPWM() and pwmForAngle() functions we can set any servo at any driver to position any angle we want.
This is a common problem with these hobby servo motors, the SG90 Micro Servo and the MG996R. The reason for this is that, as mentioned earlier, they can draw quite significant amount of current when they are at load. This can cause the Arduino board to reset, especially if you are powering the servo directly from the Arduino 5V pin.
In order to solve this issue you can use a capacitor across the GND and the 5V pin. It will act as a decouple capacitor which will provide additional current to the system at start up when the DC motor starts.
This is another common problem with these hobby servos. As we explained earlier, a pulse width of 1ms (0.5ms) corresponds to 0 degrees position, and 2ms (2.5ms) to 180 degrees. However, these values can vary from servo to servo and between different manufacturers.
In order to solve this problem, we need to adjust the pulse width we are sending to the servo motor with the Arduino. Luckily, using the Arduino Servo library we can easily adjust the pulse widths values in the attach() function.
The attach() function can take two additional parameters, and that’s the minimum and maximum pulse width in microseconds. The default values are 544 microseconds (0.544milliseconds) for minimum (0 degrees) angle, and 2400 microseconds (2.4ms). So by adjusting these values we can fine tune the moment range of the servo.
I made 3D models of the two most popular servo motors, the SG90 Micro Servo and the MG996R servo motor. You can download load them from the links below.
So, we have covered almost everything we need to know about using servo motors with Arduino. Of course, there are some many manufacturers and models of these type of hobby or RC servo motors, and each of them has its own unique features that might differ from what we explained above.
The possibilities for creating awesome robotics, automation and RC projects using motors are endless, however choosing the right model for your application is very important.
I hope you enjoyed this tutorial and le



 Ms.Josey
Ms.Josey 
 Ms.Josey
Ms.Josey