
using a tft lcd to move a servo arduino uno pricelist

This website is using a security service to protect itself from online attacks. The action you just performed triggered the security solution. There are several actions that could trigger this block including submitting a certain word or phrase, a SQL command or malformed data.

This website is using a security service to protect itself from online attacks. The action you just performed triggered the security solution. There are several actions that could trigger this block including submitting a certain word or phrase, a SQL command or malformed data.

One of the first uses of servo motors was to control the steering mechanisms of RC airplanes, cars, and boats. Today, you can find them in robots, industrial equipment, and many different Arduino projects.
Servo motors are capable of precise control of the rotation of a motor shaft. They allow you to set an exact angle of rotation with code, or with inputs like joysticks, push buttons, or potentiometers.
In this tutorial, we’ll take a look at how servo motors work and how to use an Arduino to control them. We’ll also look at two example programs you can run on the Arduino. The firstprogram will show you how to control the direction and position of a servo using two push buttons. Thesecondprogram will show you how to use a potentiometerto controlthe position of the servo.
BONUS: I made a quick start guide for this tutorial that you can download and go back to later if you can’t set this up right now. It covers all of the steps, diagrams, and code you need to get started.
Servos are DC motors that have been geared down to reduce the speed and increase the torque of the motor. They also have built in circuits that control the angle of rotation one degree at a time, and hold that position until another input is received. Servos will rotate a certain number of degrees depending on the width of the electrical pulses delivered by the Arduino:
The servo expects one pulse every 20 ms. For most servos, a 1 ms pulse results in a zerodegree rotation, a 1.5 ms pulse results in a 90 degree rotation, and a 2 ms pulse results in a 180 degree rotation.
Depending on the servo you use (larger ones especially), you should use a separate DC power supply to power it. Otherwise, the current drawn by the servo could damage your Arduino.
If you want to learn more about the Arduino, check out our Ultimate Guide to the Arduino video course. You’ll learn basic to advanced Arduino programming and circuit building techniques that will prepare you to build any project.
We’re going to use the Arduino’s built-in Servo library to program the servo. This library is included with the Arduino IDE, so there’s no need to install it.
The servo motorshould move to 0degrees, pause for one second, then move to 90degrees, pause for one second, then move to 180degrees, pause for one second, then start over.
On the first line we include the Servo library with #include
In the setup section, we initialize the servo with the attach() function. The attach() function takes one parameter – the pin that the servo is connected to. So we have servo1.attach(servoPin).
To move the servo, use the write() function with the angle of rotation as the argument. The angle is in degrees, from 0 degrees to 180 degrees. The angle changes the pulse width sent to the servo motor, which then determines the amount of rotation. We’re calling the function through the servo1 object, so we use servo1.write(angle), with 0 degrees, 90 degrees, and 180 degrees.
The write() function will work for most servos, but not all. Some servo motors have a range of 180 degrees, some have a range of 90 degrees, and some have anywhere in between. Using the write() function only allows for a maximum of 180 steps. However, there is a function that allows up to 1000steps, called writeMicroseconds(). If you want more precise control of your servo, you may want to use the writeMicroseconds() function instead of write().
In this sketch, we’ve replaced each write() function with a writeMicroseconds() function. Change the angular values from (0, 90, 180) degrees to (1000, 1500, 2000) microseconds. Upload and run the program using the same hardware setup. For a servo motor capable of a range up to 180, the values will be 1000 microseconds = 0 degrees, 1500 microseconds = 90 degrees, and 2000 microseconds = 180 degrees.
Depending on the servo motor you are using, you may notice a difference. Interestingly on my setup, while monitoring the pulses on an oscilloscope, I noticed that when using servo1.write(0);, the pulse width was only about 700microseconds, not 1000 which is the way the function should work when set at zero degrees. But when using servo1.writeMicroseconds(1000); the output was exactly 1000microseconds.
After uploading the compiled code, open the Serial Monitor on your Arduino. As you push on either button, the servo should increase or decrease as shown on the serial monitor. Initially, the code will set the servo at 90 degrees. Use the button connected to pin 3 to increase the angle. When you reach 180 degrees, the high end of the rotation, the LED connected to pin 5 will turn on. When you reach the low end of the range which is 0 degrees, the LED connected to pin 6 will turn on.
To determine the result of the button push, a whilestatement verifies the button and the angle of the shaft. while (digitalRead(pin3) == HIGH && pos < 180) determines that the button was pushed (HIGH) and the angle is less than 180, so the program adds one degree and loops on. The second button while (digitalRead(pin4) == HIGH && pos > 0) determines that the button was pushed (HIGH) and the angle is greater than 0. This causes the angle to decrease by one and loops on. The LedHi and LedLow level for LEDs are each controlled by anif statement that checks the angle to see if it’s 0 or 180. The LEDs are turned off as soon as the angle changes in each of the two while statements.
After uploading the code, open the serial monitor on your Arduino. As you adjust the potentiometer, the rotation of the servo will change accordingly. When you reach the lowerlimit of the range, the Low LED will turn on, and as you reach the upper limit, the High LED will turn on.
analogRead() takes in the voltage from the potentiometer as an analog signal. It accepts the values of the full range of input accepted in an Arduino (0-5V). It captures it as an integer in the range of (0-1023). So for example, a DC value of 0V would be captured as the integer 0; a full range value of 5V would be captured as the integer 1023, and half the input range of 2.5V would be captured as the integer 512, half of 1023.
The next line of code servo1.write(val); is the write() command that takes the integer stored in val as the argument and applies it to the servo. The servo receives a pulsefrom the servo1.write(val); and the pulse width is determined by the value of val. The servo uses the width of this pulse to determine its rotation.

Hi guys, today, I will show you how to use a servo motor with an Arduino. This tutorial is ideal for beginners because it is easy and it gives them the foundation to build interesting projects like robots for which servos are commonly used.
Servo motors are high torque motors which are commonly used in robotics and several other applications due to the fact that it’s easy to control their rotation. Servo motors have a geared output shaft which can be electrically controlled to turn one (1) degree at a time. For the sake of control, unlike normal DC motors, servo motors usually have an additional pin asides the two power pins (Vcc and GND) which is the signal pin. The signal pin is used to control the servo motor, turning its shaft to any desired angle.
Servo’s have high current requirement so when using more than one servo motor with the Arduino, it is important to connect their power connections to an external power supply as the Arduino may not be able to source the current needed for the servo. Since we will be using just one servo in this tutorial its fine to power it with an Arduino.
Servo motors generally have three pins/wires, this includes the VCC, GND, and the Signal pin. The Signal pin is the one used to feed the control signal from the microcontroller to the servo, to get the servo rotate to a particular angle.
The signal pin was connected to the digital pin 8 of the Arduino because it is a PWM pin. Servo directions are sent from the microcontroller to the servo motor as PWM pulses.
The code for this project is quite easy thanks to the very comprehensive and conciseservo.h library developed by the Arduino team to facilitate the use of servo motors in Arduino projects. The library makes it easy to turn the servo at different angles using a single command. The library comes pre-installed in the Arduino IDE removing the need for us to download and install.
With this done, we proceed to the void setup() function. we start the function by attaching the servo object created to pin D8 of the microcontroller, after which we center the servo, turning it to zero degrees.
With that done, we are ready to move the servo in any direction we desire, and we will be doing this under the void loop function. Thanks, to the servo.h library all we need to do, to rotate the servo to an angle we desire, is to pass the desired angle as an argument into the servo.write() function. To demonstrate this, a for-loop was used to turn the servos at several angles in one direction and another loop was used to turn the servo back to where it started.
Copy the code above and upload to your Arduino and servo motor setup, after a few time, you should see the servo motor start turning as shown in the gif below.
That’s it for this tutorial guys, the code above can be expanded in several ways for use in different projects involving servo motors, what cool thing will you be building with the servo motor? feel free to share via the comment section.
We have built a few projects that have used motors to make things move and along the way we have looked at some of the different types of motors that we can control with our Arduino and Raspberry Pi projects.
We have worked with basic DC motors a few times. We built a couple of robotics projects that are based upon DC motors and we also took an extensive look at the H-Bridge Controller that is commonly used to regulate the speed and direction of a DC motor with a microcontroller or microcomputer.
Another type of motor we’ve worked with is the stepper motor. This type of motor has its shaft driven in discrete steps, allowing for very precise control. They are widely used in printer and robotics designs.
A Servo Motor is a low-speed, high-torque motor that comes in a variety of sizes. Unlike the DC and Stepper motors the Servo Motor does not normally spin a full 360 degree rotation. Instead it is limited to a range of 180, 270 or 90 degrees.
A control signal is sent to the servo to position the shaft at the desired angle. This arrangement with a single signal makes it simple fo servos to be used in radio and remote controlled designs, as well as with microcontrollers.
A servo is perfect if you need to position the rudder on a boat or the elevator on an aeroplane. They are really useful in robotic work to position cameras, sensors or robot appendages.
Servos are used in industry as well as in hobby applications. Industrial servos are often AC motors with digital control inputs that cost hundreds or thousands of dollars.
Digital servos are used in applications that require quick responses like the elevator on an aeroplane or the rudder on a helicopter. We will NOT be working with these types of motors either, although the hookup and code used to drive them with an Arduino is identical to what we will use for our analog servos.
We will be using plain ordinary analog servo motors, the most popular type for hobbyist use. They are inexpensive and easy to obtain. Mounting hardware is also very easy to find as these servos are of a standard set of sizes.
It should be noted however that while we won’t be working with digital servo motors today they are really very much like their analog counterparts. They use the same PWM control signals as analog servo motors and can be controlled using the same circuitry and code.
Analog servo motors are inexpensive and available in a variety of sizes and ratings. Perfect when you need a tiny high-torque motor that can be accurately positioned and that won’t break the bank.
The “analog” part of the analog servo motor is the control signal. Analog servo motors respond to a Pulse Width Modulation or PWM signal to position their motor shaft.
PWM is an ideal control medium. It can be generated by a simple timer circuit or with a microcontroller. It can be sent over a single wire or transmitted on a radio or light beam.
The servomechanism uses a sensor to monitor the motor shaft position and a controller to control the motor. It is fed a signal that indicates the position that the shaft should be set to. It then moves the motor into the required position.
In the analog servo motors we will be working with that control signal is a PWM signal whose pulse width determines the angle the motor shaft is to be positioned at. The motor itself is a simple DC motor with a lot of gearing to slow down its speed and to increase its torque.
In order to function properly the servo motor needs a sensor that can accurately measure its shaft position. On some industrial and high-end hobby servos this is done using an optical interrupter disc, but in most standard hobby servo motors the sensor is a potentiometer. This works well as these servos typically travel 180 to 270 degrees, well within the range of a potentiometer. However the accuracy of potentiometers, especially in low cost servo motors, can affect the overall accuracy of the servomechanism.
A standard analog servo motor is constricted in its rotation, usually to 180 or 270 degrees (180 is by far the most common). Its internal gearing provides a high torque power pack in a small and inexpensive package.
That combination of small size and large torque also make servos attractive to use as replacements for standard DC motors in the design of small devices like tiny toys and robots. This prompted several people to modify standard analog servos by removing the potentiometer to allow the servo to spin a full 360 degrees.
In a continuous rotation servo motor the speed and direction of the shaft rotation is controlled by the same PWM signal that is used in a conventional analog servo motor.
Having a simple one-wire controls signal and the same physical package as a standard servo motor make continuous rotation servo motors attractive for a number of applications.
In order to use analog servo motors you need to understand how to control their operation using PWM. The two varieties, conventional and continuous rotation, use the same timing signals but respond to them slightly differently.
Varying the pulse width between 1ms and 2ms will move the servo shaft through the full 180 degrees of its travel. You can bring it to rest at any angle you desire by adjusting the pulse width accordingly.
Varying the pulse width between 1ms and 1.5ms will make the motor spin counterclockwise with the shorter pulse widths causing the motor to spin faster.
Commercial continuous rotation servo motors will have an adjustment potentiometer that can be used to zero the speed when the motor is feed a 1.5ms pulse width.
There are literally hundreds of analog servo motors available, knowing how to read their specifications is essential to choosing the correct one for your application.
The physical size of a servo motor is naturally an important consideration, chances are your application will demand that the motor conform to specific size restrictions.
Metal gears offer better performance, can usually support higher torques and are less subject toi stripping. Metal gear servos also come at a higher cost.
Plastic gears are more susceptible to stripping and don’t have the torque capabilities of their metal counterparts. They are however quieter and are less expensive than metal geared servo motors.
You can often get the same servo motor with a choice of gears. A common experimenters motor is the SG90, a Micro sized servo motor with plastic gears. Its metal-geared counterpart is the MG90. As they come in the same case and have the same voltage and driver requirements they are interchangeable, with the MG90 offering superior performance because of its metal gears.
Servo motor quality is also affected by the type of bearings and the number of them. Motors with multiple bearings have smoother and more accurate rotation.
High speed servos are used in model aeroplane and helicopter application to control elevators and rudders which often need to be moved quickly. Many of these use digital control and internal optical position sensors instead of potentiometers to allow for more rapid movement.
The servo motor can support up to 5kg of load on a lever at a distance of 1 centimeter from shaft center. If you prefer Imperial measurements then it could support a 69.4 ounce load (about 4.3 pounds) at a distance of 1 inch.
Larger servo motors tend to have larger torque capabilities, motors with greater torque tend to be more expensive. They also weigh more and consume more current.
There are also more servos being offered with maximum voltage ratings of 7.5 to 8.5 volts. These are becoming more popular due to the availability of 7.4 volt LiPo batteries for model aircraft, boats, vehicles and quadcopters.
Servo motors, especially high torque models, can consume quite a lot of current, this needs to be taken into account when selecting a power supply or battery for your project.
In order to make use of the servo you will need to connect the shift to another component in your design – a platform, a gear, a wheel or whatever it is you are trying to move with the servo.
Servo motors come with an assortment of levers and discs of different shapes that can be mated to the shaft to facilitate attaching the servo to your design. These pieces are often referred to as “horns” or “arms”. They attach to the servo motor shaft and are secured in position with the center screw and they can be made of plastic or metal.
In addition to the horns and arms you should also receive an assortment of mounting hardware and screws with your servo, including the center screw for the shaft (don’t lose it as they tend to differ between servo types).
The availability and interchangeability of servo horns, arms, mounting hardware and accessories makes it easy to incorporate servo motors into your designs.
This can be very helpful when you are about to mount the servo into a mission-critical application, or just into something that would be a pain to have to take apart if the servo turns out to be faulty!
It is also useful to be able to rotate the servo shaft into a preset position (for example 90 degrees) before mounting the sero into your project so that everything gets aligned correctly.
There are a number of methods you can use to test a servo. A simple Arduino sketch and connection like the ones you’ll be seeing here further on will make an excellent method of testing a servo and of positioning its shaft into a preset position.
As you might imagine a Servo Tester is a device used to test servo motors! They are very useful and can be very inexpensive, depending upon the features you want.
These units need to be powered by the same power supply (or equivalent) that you’ll be using the power the motors themselves. They can be plugged in to a standard servo motor connector and they will take control of the servo.
The servo testers will allow you to manually move the motor and to center it at the 90 degree position. This lets you check the motor for correct operation and to align its shaft position before you fasten horns or arms to it.
Analog servo motors typically have a 3-pin connector. On some more expensive motors the motor cable can be removed at the motor base and replaced if required, other motors have the connector permanently wired onto a short 3-wire cable.
The color codes used on hobbyist servo motors varies depending upon manufacturer. However most manufacturers observe the same pinout, as shown in the following diagram:
The most common connector is the standard DuPont variety with 0.1 inch spacing. This makes it easy to connect servo motors to your project using standard DuPont header strips.
As we have already described a servo motor requires a PWM control signal to operate correctly. You can generate this signal many ways – a simple timer circuit, a dedicated control chip or using a microcontroller with PWM output capabilities.
Keep in mind that to generate the PWM signals the Servo Library will need to use some of the internal Arduino timers, specifically Timer 1. This can interfere with other libraries that also need the same timers. One way around this is to look for alternate libraries for either the servo of=or the other desired function, this is a common way of getting around these restrictions.
Servos can consume a fair amount of current, especially when placed under load. This might be more current than the voltage regulator on the Arduino board can take, especially on cheaper clone boards. While most Arduino boards can support one Micro servo it still taxes the regulator a lot.
Servo motors, like all other motors, can induce electrical noise onto the power supply lines. Having that noise on the lines powering your microcontroller and other logic devices can often lead to system errors.
It is a much better idea to use a separate power supply for your servo motor. A 5-volt USB 3 power supply would work well, as would a 6-volt lantern battery or 4 type AA or C batteries.
If you REALLY must power a servo directly from the Arduino limit it to one micro servo. A capacitor of 100uf or greater across the power supply line near the servo can help absorb those power surges.
For our first Arduino sketch we will use one of the built-in examples that is packaged with your Arduino IDE. No code to write or libraries to install!
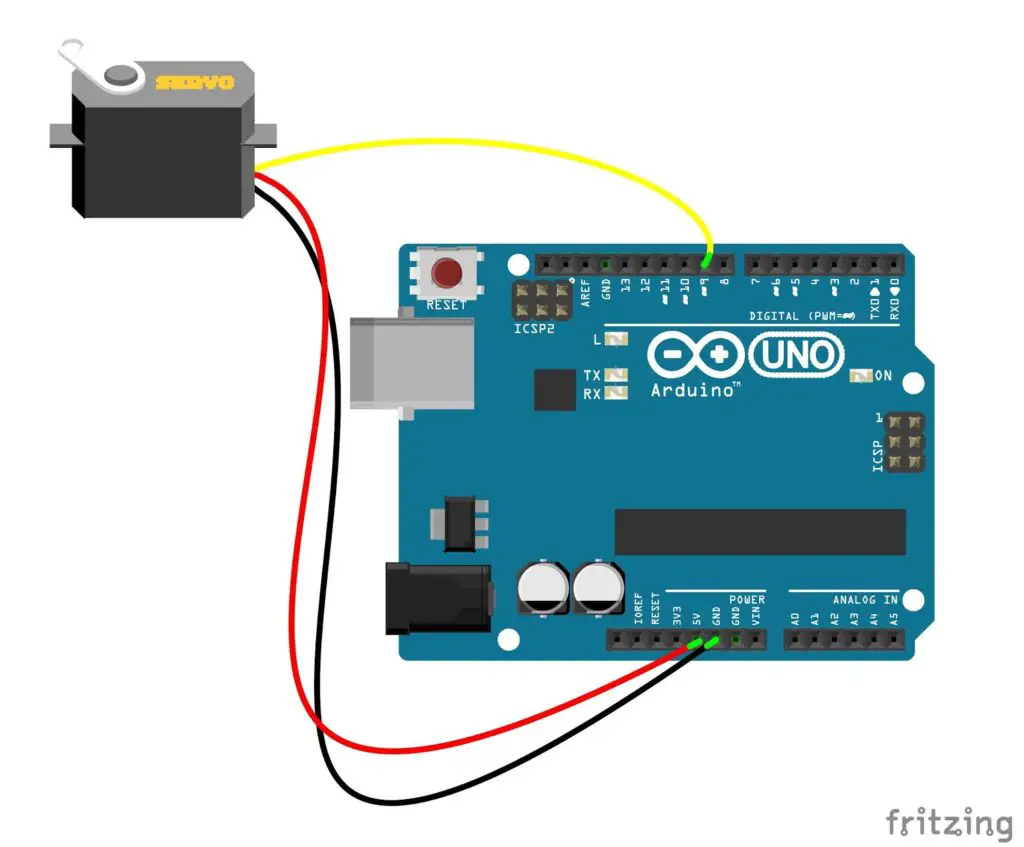
Wiring up the hardware to use with our first demonstration is very simple. You’ll need an Arduino (any type), a servo motor and a power supply for the servo motor.
The hookup couldn’t be simpler. The servo is powered by its own power supply and the ground connection is also connected to the Arduino ground. Then the control lead from the servo is connected to pin 9 on the Arduino.
A list of example sketches will be displayed. It is divided into sections, scroll down the list until you get to the “Examples from Libraries” section.
The sketch makes use of theArduino Servo Librarywhich is included with your Arduino IDE. As its name implies its is a library for controlling servo motors with PWM. We include the library and define an object calledmyservoto represent our servo motor. If you have multiple servo motors you can define an object for each of them.
Then the loop, which consists of two for loops. The first loop increments the value of theposvariable and uses it to control the servo motor using amyservo.writecommand, sending the shaft from 0 to 180 degrees.
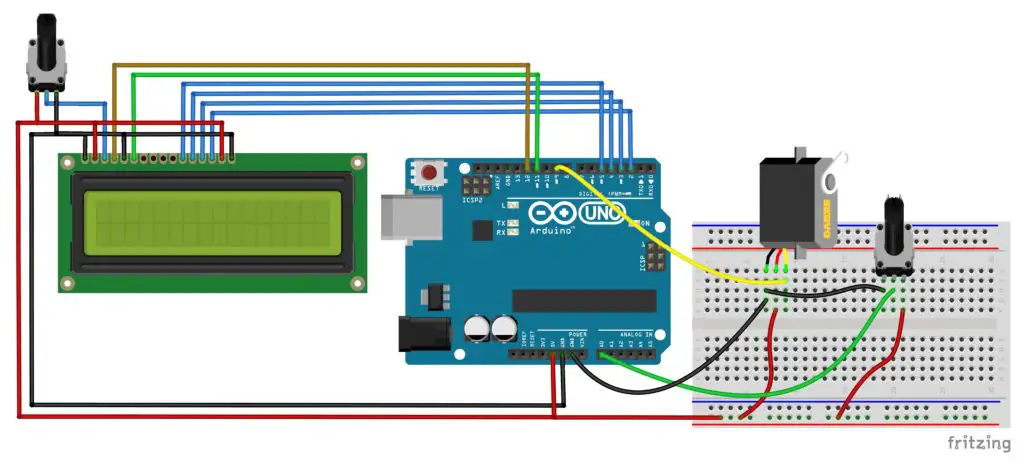
As the wiring diagram shows you’ll need a potentiometer, any value from 10k up will work fine. Hook one end of the pot to ground, the other end to the Arduino +5 volts. The wiper is connected to analog input A0.
The potentiometer will serve as a control to position the shaft of the servo motor, you can use it to dial any position on its 180 degree travel. Not only is it a good demonstration it also can be a useful function for setting the position of servo motors before mounting them into your project.
If you substitute a continuous rotation servo in the circuit you can use the potentiometer to control both the speed and direction of the motor’s rotation.
After you modify the experiment to include the potentiometer open the Arduino IDE and go back to the example sketches. This time selectSweepfrom theServomenu.
The Sweep sketch is also very simple. Like the Knob sketch it uses the Arduino Servo Library which it includes and then creates amyservoobject to represent the servo motor.
We then define a couple of integers. The first one,potpin, represents the analog pin we used for the potentiometer wiper connection. The other one,val, is the value taken when reading that analog input.
In the loop we start by reading the value from the analog pin, a value of 0 to 1023 which will be assigned toval. Next we use the Arduino Map Function to changevalto represent the angle between 0 and 180 degrees.
The Arduino Servo Library can conflict with other Arduino libraries as they attempt to use the same timer. This can sometimes be solved by looking for alternative libraries.
A better solution all around is to use a separate servo driver board. This will offload the task of sending PWM to the servos, freeing up your Arduino to do better things.
The PCA9685 board uses I2C to communicate with the Arduino. This means only two connections for clock and data are made to the Arduino. As the boards I2C address can be configured using a series of solder pads you can use many of them on the same circuit.
There are a set of identical connections on each side of the circuit board, this makes it easy to connect several modules up in a row. They are as follows:
OE– Output enable. You can use this pin to enable and disable all of the 16 outputs. Typically it is left unconnected which will result in all outputs being enabled.
V+– the power for the servo motors. There is also another connector on top of the board for this and that connector is preferable as it is reverse polarity protected while V+ is not. The V+ pins are really used to cascade multiple PCA9685 modules and power all the servos off of a single power supply.
On the top right of the board are six solder pads. These are used to setup the I2C address for the board. If you are using more than one board you’ll need to jumper one or more of these to change its internal I2C address to be unique.
In order to demonstrate the use of the PCA9685 PWM module to control multiple servo motors I decided to bring out the MeArm which I built earlier. It has four servo motors.
You’ll notice that I also added four potentiometers, as before these can be any value of 10k or above and will be used to regulate the operation of each of the four servo motors.
The PCA9685 module hooks up to the SCL and SDA connections on the Arduino. If your Arduino does not have pins for these I2C connections then use analog pin A4 for SDA and pin A5 for SCL.
The Arduino power is also used to power the VCC power on the PCA9685 module. A seperate power supply for the four servos is connected to the screw connector on the module.
I connected my servo motors to outputs 0, 4, 8 and 12. You can actually use any four connections, just note them so you can modify the code to match your selection.
The sketch makes use of the Adafruit PWM Servo Driver Library which you will need to install to make this work. It can be installed from the Library Manager in your Arduino IDE.
The first two constants define the minimum and maximum pulse width for the PWM signal we will be sending to our servos. A you recall this pulse width will determine the position of the servo shaft.
The third constant we define is the PWM frequency, which for analog servo motors is 50 Hz. If you are using digital servo motors you may want to increase this as they can often use frequencies as high as 200 Hz.
Next we create an object calledpwmusing the Adafruit PWM Library. If you used an address other than the default 0x40 you would need to define it here.
Now we define some variables. The first one is the potentiometer input pins, A0 through A3. After that are the motor outputs on the PCA9685 board, I used 0, 4, 8 and 12 when I hooked up my motors. Change these values if you used different connectors for your motors.
Now onto the Setup. We initialize thepwmobject we created earlier and then set the frequency of the PWM oscillator to the frequency we defined, which in our case is 50 Hz.
Our function is calledmoveMotor.It has two inputs,controlInwhich represents the potentiometer input andmotorOutwhich represents the motor connection on the PCA9685.
The function reads the potentiometer value and converts it to a pulse width. This pulse width is then used with thesetPWMmethod of the Adafruit PWM Servo Library to send the pulse to the motor specified by themotorOutvariable.
The result is that the four servo motors in the MeArm will respond to the potentiometers. In the demo I used slide potentiometers which made it a lot easier to precisely position the MeArm (I use the term “precisely” with a lot of poetic license!).
Servo motors are versatile little devices that have a myriad of uses in hobbyist projects and knowing how to control them is an essential Arduino coding and wiring skill.
Hopefully this article and its associated video have helped shed some light on using servo motors, either connected directly to an Arduino or via I2C using a PCA9685 PWM controller.
Learn how to use analog servo motors with the Arduino. Covers the Arduino Servo Library and using the PCA9685 PWM controller to control multiple servo motors.

Let’s take a look into a simple interfacing project this time. This is actuator interfacing with Arduino Uno and the actuator being servo motor, specifically SG90 servo motor. SG90 is a lightweight (just 9g) and tiny servo motor which has quite good output toque. We can use Arduino IDE to code this servo and control its movements precisely. We can rotate 180 with this servo motor.
This project uses SG90 servo motor interfaced with Arduino Uno which is programed to turn the servo motor from 0 degrees to 180 degrees and back to 0 degrees.
For demo purposes, with zero load on the servo motor, we are powering the servo motor using Arduino 5V pin. But it is important to keep in mind that the motor should be powered separately. This servo motor has input voltage of 4.8V to 6V DC. It is recommended that the servo motor should be powered externally (using a dedicated power supply) and the voltage should be within the accepted range. The maximum current draw from Arduino is 0.8A only. So when we use an external power supply, it will make sure that the Arduino board won’t be damaged due to excess current draw.
There is a common problem when dealing with SG90 (or even MG90S) that is the overshooting or undershooting. This is a problem has a bit to do with Control Systems. In general, we can say, the systems that are overdamped miss the target value, that causes the “undershoot”. This means, the servo would not really reach 0 to 180 degrees or other specified value. Whereas those systems that are underdamped go over the target. This causes the situation to “overshoot”. This is when the servo motor exceeds the specified degree and sweeps more area than it is supposed to do.
There are a couple of fixes available online for this overshoot/undershoot problem. You could use a better servo motor like “Tower pro MG 995” servos. This is not a micro servo like SG90 but it is more precise and it can also deliver more power. There are other servo motors that are used for model aircraft building; they are known to be more precise. They give very good results but are quite expensive. If you really want to use SG90 servo motor only and get precise degree turn, then, consider the following points to get better results:
The circuit connections for this project are very simple as the servo motor has only 3 pins. The red wire of the servo goes to 5V pin of Arduino Uno. The Black wire of the servo goes to Arduino Uno’s ground pin (GND). And the yellow wire (called the control pin of servo) goes to Arduino pin 8. This completes the circuit connections of the servo motor with Arduino Uno.
First, we need to include a library called “Servo.h” to be able to control various servo motors. If you don’t already have this library in your Arduino IDE, then you can go to “tools” à “Manage Libraries…” and type “Servo” in the Library Manager and install the one from “Michael Margolis, Arduino”.
Next, we declare a variable called “servo”. In void setup function, we use the servo.attach function to tell the Arduino board that the control pin of the servo motor is attached to pin 8 of Arduino (the function attaches the servo variable to the pin). The servo.write function is used to tell the servo the degree to which it should turn. At the beginning the default state of servo is considered as zero degree we keep this as origin position that is zero degrees. So we write servo.write(0). Then a delay function is used to create a delay of 2ms.
Next, in void loop, we use the servo.write function again to tell the servo to turn to 180 degrees and the delay function will hold this position for 1ms. Then the servo is instructed again to go back to 0 degrees, as we had initialized before. The delay function will hold this position for 1ms. This is repeated until the power is disconnected or servo is disconnected.
This is a beginner friendly project. It focuses on controlling an actuator, SG90 Servo motor, using Arduino Uno and Arduino IDE. It provides a strong basic foundation in dealing with actuators and helps beginners jump into more fun with actuators.
Servo motors have earned an important place in robotics. Fortunately for robot builders, another hobby — model radio control — has made these motors plentiful, easy to use, and best of all, inexpensive.
In this article, you"ll learn what you need to know to use radio control (R/C) servos in your robot projects. While there are other types of "servo" motors, it is the R/C type that is commonly available and affordable, so I"ll be sticking with those only.
Servo motors designed to be operated via a radio-controlled link in model airplanes and cars are commonly referred to as radio-controlled servos though, in fact, the servo motor itself is not what’s radio controlled. The motor is merely connected to a radio receiver on the model. The servo takes its signals from that receiver. This means you don’t need to control your robot via radio signals just to use an R/C servo (unless you want to, of course). You can control a servo with your PC, a microcontroller such as the Arduino, or even a simple timer circuit.
FIGURE 1. A standard size servo motor for radio controlled model airplanes and cars. The flanges allow easy mounting, and the output of the servo can be readily attached to wheels, linkages, and other mechanisms. Photo courtesty Hitec RCD.
It measures about 1-1/2” x 3/4” x by 1-3/8”. For this style of servo, its size and the way it’s mounted is the same, regardless of the manufacturer. That means you have your pick of a variety of makers and can compare prices. There are other common sizes of servo motors besides that shown in the figure which are used for specialty applications. These include model airplane landing gear mechanisms. I won’t be talking about these here, but just know they’re available should you want to experiment further.
FIGURE 2. How an R/C servo works. A control signal causes the motor to turn one direction or the other, depending on the current position of the output shaft.
Reduction gears. The high speed output of the motor is reduced by a gearing system. Many revolutions of the motor equal one revolution of the output gear and shaft of the servo. In most servos, the output gear turns no more than about 180 degrees in either direction, and is limited by mechanical stops.
Control circuitry. The output gear is connected to a potentiometer — a common electronic device similar to the volume control on a radio. The potentiometer connects with a control circuit. The position of the potentiometer indicates the position of the output gear.
The motor and potentiometer are connected to a control board — all three of which form a closed feedback loop. While 180° (half a circle) may not sound like much, in actuality such control can be used to steer a robot, move legs up and down, rotate a sensor to scan the room, and more. The precise angular rotation of a servo in response to a specific digital signal has enormous uses in all fields of robotics. As you can surmise, standard radio control servo motors are designed for limited rotation rather than for continuous rotation, like a DC gear motor. There are servos that rotate continuously — and you can modify one to freely rotate (see later). This allows you to use a servo motor to drive your robot around a room.
Most R/C servo motors are designed for operation at 4.8 to 6 volts. Some can be powered with up to 7.2 or even 9.6 volts, but these aren’t as common. In any case, you should always check the specifications of your servos before applying juice to them to make sure you are operating them within safe limits.
You can’t run an R/C servo simply by connecting it to a battery. It needs special control signals to operate. In a radio control application, the receiver — mounted some place in the airplane or vehicle — both powers and controls the servo. For robotics, you replace the function of the receiver with a microcontroller or other circuit. As it turns out, it’s not terribly hard to control a servo using simple programming. It’s easy stuff for all the popular microcontrollers, such as the Parallax BASIC Stamp and Propeller, the Arduino, and PICAXE.
The control signal that commands a servo to move to a specific point is in the form of a steady stream of pulses. The exact duration of the pulse — in fractions of a millisecond (thousandths of a second) — determines the position of the servo as shown in Figure 3.
FIGURE 3. The length of the control pulses determines the angular position of the servo shaft. The pulse range is from 1.0 milliseconds to 2.0 ms. A pulse of 1.5 ms (1,500 µs) positions the servo shaft in the middle.
Note that it is not the number of pulses per second that controls the servo, but the duration of the pulses that matters. This is very important to fully understand how servos work, and how to control them with a microcontroller or other circuit. Specifically, the servo is set at its center point if the duration of the control pulse is 1.5 milliseconds. Durations longer or shorter command the servo to turn in one direction or the other.
This is referred to as the refresh or frame rate; if the refresh rate is too low, the accuracy and holding power of the servo is reduced. If there are way too many pulses per second, the servo may jitter and fail to work properly.
The power delivered to the motor inside the servo is also proportional to the difference between where the output shaft is and where it’s supposed to be. If the servo has only a little way to move to its new location, then the motor is driven at a fairly low speed. This ensures that the motor doesn’t “overshoot” its intended position. If the servo has a long way to move to its new location, then it’s driven at full speed in order to get it there as fast as possible. As the output of the servo approaches its desired new position, the motor slows down. What seems like a complicated process actually happens in a very short period of time — the average servo can rotate 60° in a quarter to half second.
Most standard servos are designed to rotate back and forth by 90° to 180°, given the full range of timing pulses. You’ll find the majority of servos will be able to turn a full 180° or very nearly so.
The actual length of the pulses used to position a servo to its full left or right positions varies between servo brands, and sometimes even between different models by the same manufacturer. You need to do some experimenting to find the optimum pulse width ranges for the servos you use. This is just part of what makes robot experimenting so fun! The 1–2 ms range has built-in safety margins to prevent possible damage to the servo. Using this range provides only about 90° to 120° of turning, which is fine for many tasks.
If you want a full stop-to-stop rotation, you need to apply pulses shorter and longer than these. Exactly how long depends entirely on your specific servo. Full rotation (to the stop) for one given make and model of servo might be 0.730 milliseconds in one direction, and 2.45 milliseconds in the other direction.
You must be very careful when using shorter or longer pulses than the recommended 1–2 ms range. Should you attempt to command a servo beyond its mechanical limits, the output shaft of the motor will hit an internal stop which could cause gears to grind or chatter. If left this way for more than a few seconds, the gears may be permanently damaged.
The 1.5 millisecond “in-between” pulse may also not precisely center all makes and models of servos. Slight electrical differences even in servos of the same model may produce minute differences in the centering location. It’s not hard to adjust for these differences, but you need to know about them so you don’t get frustrated when you find the servo isn’t behaving the way you think it should!
Timing signals for R/C servos are often stated in milliseconds, but a more accurate unit of measure is the microsecond — or millionth of a second. To convert milliseconds to microseconds, just move the decimal point to the right three digits. For example, if a pulse is 0.840 milliseconds, move the decimal point over three digits and you have 0840, or 840 microseconds (lop off the leading zero; it’s not needed).
The motor inside an R/C servo turns at several thousand RPMs. This is way too fast to be used directly, so all servos employ a gear train that reduces the output of the motor to the equivalent of about 50–100 RPM. Servo gears can be made of nylon, metal, or a proprietary material.
Besides the drive gears, the output shaft of the servo receives the most wear and tear. On the least expensive servos this shaft is supported by a plastic or resin bushing which obviously can wear out very quickly if the servo is used heavily. A bushing is a one piece sleeve or collar that supports the shaft against the casing of the servo.
Metal bushings — typically made from lubricant-impregnated brass (often referred to as Oilite, a trade name) — last longer but add to the cost of the servo.
The best — and more expensive — servos come equipped with ball bearings, which provide the longest life. Ball bearing “upgrades” are available for some servo models, but it’s usually cheaper (and certainly easier) just to buy a servo already equipped with them.
When looking at servos, you’ll often see a notion regarding the bearing type — either bushing or bearing — and whether it’s metal or plastic. You also may see a notation for “top” or “bottom;” this refers to the servo having a bushing or bearing on the top and/or bottom of the output gear like that shown in Figure 5.
Better servos have two bushings or bearings: one each on the top and bottom of the gear. That provides the best support, and the servo will last longer.
Radio control servo motors enjoy some standardization. This sameness applies primarily to standardized servos, which measure approximately 1.6” x 0.8” x 1.4”. For other servo types, the size varies somewhat between makers, as these are designed for specialized tasks. Table 1 outlines typical specifications for several types of servos including dimensions, weight, torque, and transit time.
Of course, except for the size of standard servos, these specifications can vary between brand and model. A couple of the terms used in the specs require extra discussion:
The torque of the motor is the amount of force it exerts against a load. One common torque unit of measure for R/C servos is often expressed in oz-in (ounce-inches) — or the number of ounces the servo can lift when the weight is extended one inch from the shaft of the motor. (Other common measurements include Newton-meters but the general concept is all the same.) Servos exhibit high torque thanks to their internal gearing.
The transit time is the approximate time it takes for the servo to rotate the shaft a certain number of degrees (usually 60°). Small servos turn at about a quarter of a second per 60°, while larger servos tend to be a bit slower. The faster the transit time, the faster acting the servo will be.
You can calculate equivalent RPM by multiplying the 60° transit time by six (to get full 360° rotation), then dividing the result into 60. For example, if a servo motor has a 60° transit time of 0.20 seconds, that’s one revolution in 1.2 seconds (.2 x 6 = 1.2), or 50 RPM (60 / 1.2 = 50).
Just know there are variations on the standard themes for all R/C servo classes. For example, standard servos are available in more expensive high speed and high torque versions. Servo manufacturers list the specifications for each model, so you can compare and make the best choice based on your particular needs.
Besides overall size, another common trait in R/C servos is the connector and even wire colors. There are three primary connector types found on R/C servos: “J” or Futaba style; “S” or Hitec/JR style; and “A” or Airtronics style.
Servos made by the principal servo manufacturers — Futaba, Airtronics, Hitec, and JR — employ the connector style popularized by that manufacturer. In addition, servos made by competing manufacturers are usually available in a variety of connector styles, and connector adapters are always available. For robotics, the physical shape of the connector is often not an issue as the connector is used with a simple three-pin header to make electrical contact. The pin spacing is the standard .100”; where the connector type comes into play is when using an R/C receiver designed for one servo type or another.
The pinouts of the three wires used with servos is the same, except for the “old-style” Airtronics servos (and the occasional oddball four-wire servo). This pinout is shown in Figure 6.
FIGURE 6. Standard three-pin connector used on the vast majority of R/C servo motors. The connector may or may not be "keyed" using a groove or notch.
With very few exceptions, R/C servo connectors use three wires providing ground, DC power (+V), and signal. The +V DC power pin is almost always in the center; that way, if you manage to plug the servo in backwards, there’s less chance of damage caused by reverse polarity.
Most servos use color coding to indicate the function of each connection wire, but the actual colors used for the wires vary between servo makers. Here’s a general idea of what you’ll find on most servos out there:
Unlike a DC motor — which runs if you simply attach a battery to it — a servo motor requires a particular type of control signal to manage its direction. All microcontrollers can be used to control an R/C servo. The basic connection scheme is shown in Figure 7.
FIGURE 7. General connection diagram for attaching a microcontroller to a servo motor. The resistor is optional, but is included to prevent excessive current draw by the servo.
The microcontroller and servo can share the same power source, assuming the controller has an onboard regulator. However, it’s much better to use a separate source for the servo. Why? Servos draw a lot of current when they’re first turned on or in motion. By using separate sources — a nine volt battery for the controller, for example, and a set of four AA cells for the servo — you avoid messy power line problems.
Only one input/output (I/O) line from a microcontroller is needed to operate the servo. You may insert an optional resistor in-line between the controller and the signal input of the servo. This helps protect the microcontroller in case the servo has an (unlikely) internal electrical problem.
Even if your microcontroller isn’t a speed demon and has no trouble creating pulses for up to six or eight servos, you may not want to use it for that task, freeing precious processing time for other robot functions. When using many servos, you can turn to a dedicated servo controller. These are separate circuit boards that act as a pulse making coprocessor. Making the electrical connection to your servos is often as simple as plugging a set of three-pin headers into a solderless breadboard. Figure 8 shows attaching two servos to an Arduino Uno microcontroller board.
Note that the servos are powered by their own set of batteries, and that the negative (ground) connection of these batteries is shared with the Arduino ground connection. This is important, or otherwise the servos are likely to behave erratically — if they operate at all.
You can make servo plug adapters for a solderless breadboard using the so-called “double long” male pin headers available at Parallax, Pololu, and other online sources. These are like standard male pin headers, except the pins are equally long on both ends (see Figure 9). This allows for plugging the pins into both a solderless breadboard and the servo connector.
FIGURE 9. Use double-length male headers with standard .100" spacing between pins to connect R/C servos to your circuits. Get the kind where you can break off as many of the pins as you need.
So far, I’ve only talked about servos that are used when precise angular positioning is required — like scanning a sensor from side to side. Fortunately, R/C servos can also rotate continuously, either by design or via modification that you perform yourself. R/C servos make terrific drive motors for your robot. They tend to be less expensive than comparable DC gearmotors of the same specification, and they come with their own driver electronics. They’re definitely worth considering for your next robot. Servos that rotate continuously act like an ordinary geared DC motor, except it’s still controlled by sending it pulses.
Note that stopping the motor by ceasing the pulses works for most servos except for digital servos. On most digital servos, when pulses are stopped the servo will merely continue with the last good position information it received. You’re not likely to use digital servos for continuous rotation, so this problem seldom comes up in real life, but keep it in mind just in case.
There is a small handful of servos made for continuous rotation. These include the GWS S-35, the Parallax continuous rotation servo, and the SpringRC SM-S4303R. These are available from a variety of online resellers such as Pololu, Parallax, and SparkFun.
You can also convert most any servo to continuous rotation. Once modified, they are no longer capable of precise angular rotation, but they’re perfectly suited as drive motors for wheeled and tracked bots. There are a number of methods you can use to modify an R/C servo for continuous rotation. The basic process involves removing the mechanical stops, and — for some types of servo surgery — making a change in the electrical connections inside. You’ll need the following tools to complete the conversion process:
Servo modification varies somewhat between makes and models, but the basic steps are similar. The procedure discussed here is common to those servos where the output gear does not require to be physically mounted on the potentiometer shaft. Rather, the gear sits atop a ball bearing or a plastic or metal bushing.
Note! It’s possible to damage the servo and/or its main output gear, so have a spare servo handy in case you make a mistake. This is a learning process and requires some patience and skill to get right.
1. Remove the case of the servo to expose the gear train, motor, and potentiometer. This is accomplished by removing the four screws on the back of the servo case and separating the top and bottom.
2. File or cut off the nub on the underside of the output gear that prevents full rotation. This typically means removing one or more gears, so you should be careful not to misplace any parts. If necessary, make a drawing of the gear layout so you can replace things in their proper location, or take a photo. Important! When cutting off the nub, you’ll want to “nibble” it away in smaller chunks. The pressure of a single large cut may cause too much pressure in the plastic, breaking the gear.
3. On those servos that have a retainer clip at the bottom of the output gear, remove the clip to disengage the potentiometer from the gear. In this way, the pot no longer turns when the gear does. On some servos, there is no retainer clip; the servo engages into a spline molded into the bottom of the gear. On these, you need to carefully drill out the bottom of the gear. One method is to temporarily attach the output gear to a large servo horn disc, and clamp the gear and horn steady with a pair of pliers.
Of course, I could go on for many more pages talking about radio control servos for robotics, but we’re out of space. For a hands-on look, check out my ArdBot and ArdBot II series in past issues of SERVO Magazine.
The most common — and most affordable — R/C servos are analog, meaning their control circuitry uses traditional techniques for controlling the motor. Digital servos use onboard microcontrollers to enhance their operation.
Among the added features of digital servos are higher power and programmable behavior. With the proper external programmer (available separately at extra cost), it"s possible to control the maximum speed of the servo, for example, or make the servo always start from power-up in a specific position.
Except for higher torques, from an applications standpoint there is little difference between analog and digital servos. You control both the same way. However, the higher torque of a digital servo means the motor is drawing more current from its power source, which means batteries tend not to last as long between charges.
For most robotics applications, digital servos are not required. You can get by with the less expensive standard analog servos. An exception is when building a walking robot, where the extra torque of digital servos comes in handy. Six-legged walking bots may use 12 or even 18 servos just for the legs. The higher torque helps to offset the added weight of all those servos.

A joystick is an input device consisting of a stick that pivots on a base and reports its angle or direction to the device it is controlling. The Joystick Module is a tiny low cost option to add a game like control to your projects. Be it robotics or any other project that requires a precise human control. The module has two potentiometers for the X and Y axis measurements. Also a switch that can give an additional control option.
Online shopping is only as good as its execution and Hallroad.org promises hassle free delivery right from the moment you order to when your package is dropped at your door. We cater to both major and smaller cities Mandi Bahauddin, Taxila, Rawalpindi, Multan, Islamabad, Lahore, Karachi, Faisalabad, Rahim Yar Khan, Wah Cantt, Gujranwala, Bahawalpur, Gujrat, Sargodha, Sahiwal, Mianwali, Abbottabad, swabi, peshawar, Dera Ismail Khan, Mardan, Jamshoro, nawabshah, sukkur, khuzdar, quetta, Mirpur Azad Kashmir, Muzaffarabad, Risalpur, Jalozai, Bannu, Kohat and all over Pakistan. Our delivery service give you the choice to track your package as it makes its way to you so you always know your order status. If you are unsatisfied with any aspect of your order, we have a simple 3-day return policy.
Hallroad.orgunderstands that online shopping in Pakistan comes with its fair share of risks. This is why with Hallroad.org Marketplace customers have the security of choosing from verified vendors and brands from Lahore. Soon our vendor network is going to expend to Karachi, Islamabad, Peshawar, Rawalpindi and all across Pakistan. Now you’ll never have to check authenticity because Hallroad.org makes sure to do it for you.
Online shopping with Hallroad.org means you get the chance to avail exclusive online only promotional packages as well as discount vouchers from our vendors when you shop from their pages. Our flash sales give you customized electronics product offers all curated with the help of our advanced AI technology so you always have deals you’ll actually be interested in!

It was a great experience in ordering the CM4 on CoD. Electricscomp promptly delivered. I"m enthused that I have already ordered 2 other items from here.
Hi viewers. Ordered for a unit of Renata SR936SW (394) cell. Delivered crisply packed on time on July 20th 2022. Working fine. I would recommend this to any purchaser.
3.7V 3500mAH (Lithium Polymer) Lipo Rechargeable Battery also known as Lipo or Lipoly batteries are thin, light and powerful. This battery has a capacity of 3500mAH. These Batteries are widely used in GPS, DVD, ipod, Tablet PC, MP4 Player, Power Bank, Mobile Backup Power Supply, Bluetooth Speaker, IOT and other DIY and Industrial applications.
i come across this site randomly and i couldn"t trust this site initially. So, i ordered cash on delivery and they blew my mind with product quality or package and the delivery.I will buy next time and i refer this to everyone to trust and go with your purchases.
3 years of review, it"s still working very well,no complaints about the product. but the shipping process is very slow,and the package box is also damaged, please use some strong material in packaging process
ITS EXCELLENT SAME AS ABOVE PICTURE WORKING VERY WELL FROM 5V TO EVEN 36V RANGE I ADDED HEAT SINK FOR 21V HEAT SINK REQUIRED FOR LOWER VOLTAGES OR HIGH OUTPUT POWER
As expected good quality i bought 80 number and all are working and not to mention all the led received has similar brightness which indicates the quality. Swift delivery Highly recommend this team. Thank you
i purchased this board a month ago.it is a very good board to start with.it is of good quality even though its cheap.i recommend you to buy a good case
Amazing product and its cheaper than anywhere else, arrived in good condition as their packing was another thing that i would like to talk about, it was all in anti-static packet (as i ordered some other stuffs too with it) and battery was packed in 2 layers of bubble wrap then the cardboard box, very nice experience,thank you
This is one of the first product that I ordered combined from this shopping site and I am very pleased to have a very very good experience with them. First I was afraid that it was a fraud site but I turned out to be better than amazon and flipkart. The products were well packed and were unused. All single product came in a plactic zip lock packet which I didn"t expected. The potentiometer does its job as expected. It is also of high quality. I also have a YouTube channel named fireracer workshop I which I show some unboxing and diy task regarding repairing and making some innovative machines so please check that out.
I"m buying something on this website for the first time. Was scared that will I get fake but I got the 2019 Refreshed Model. Best Buy. Looking to buy more from here.
Nice board awesome price. There was some problem with the delivery at the start but when it arrived it worked like a charm. I would recommend this board if you wanted something that looked like the original Arduino Uno:)
if you are wondering which values of capacitors are there, then let me tell you that it contains ceramic capacitors from 1pf(picofards) to 10k pf (kilo picofarad)
It was glad to got my device from you which I needed very urgently , I ordered on 21 st of July and I got it on 23rd July , today I used that device today and it,s awesome thank you so much ....
I bought this product. Even it says its clone model, I feel good build quality and it look like original one. Its printed as made in italy. I think this is more than worth for money.



 Ms.Josey
Ms.Josey 
 Ms.Josey
Ms.Josey